Double-layer coordination control method for stabilizing wind power fluctuation of hybrid energy storage system
A technology for hybrid energy storage systems and wind power fluctuations, applied in wind power generation, electric vehicles, reducing/preventing power oscillations, etc., can solve problems such as overcharging and overdischarging, inability to complete stabilization tasks, and limited SOC of energy storage equipment , to achieve the effect of prolonging the service life, improving the utilization rate of equipment, and reducing the number of times of deep charging and deep discharging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
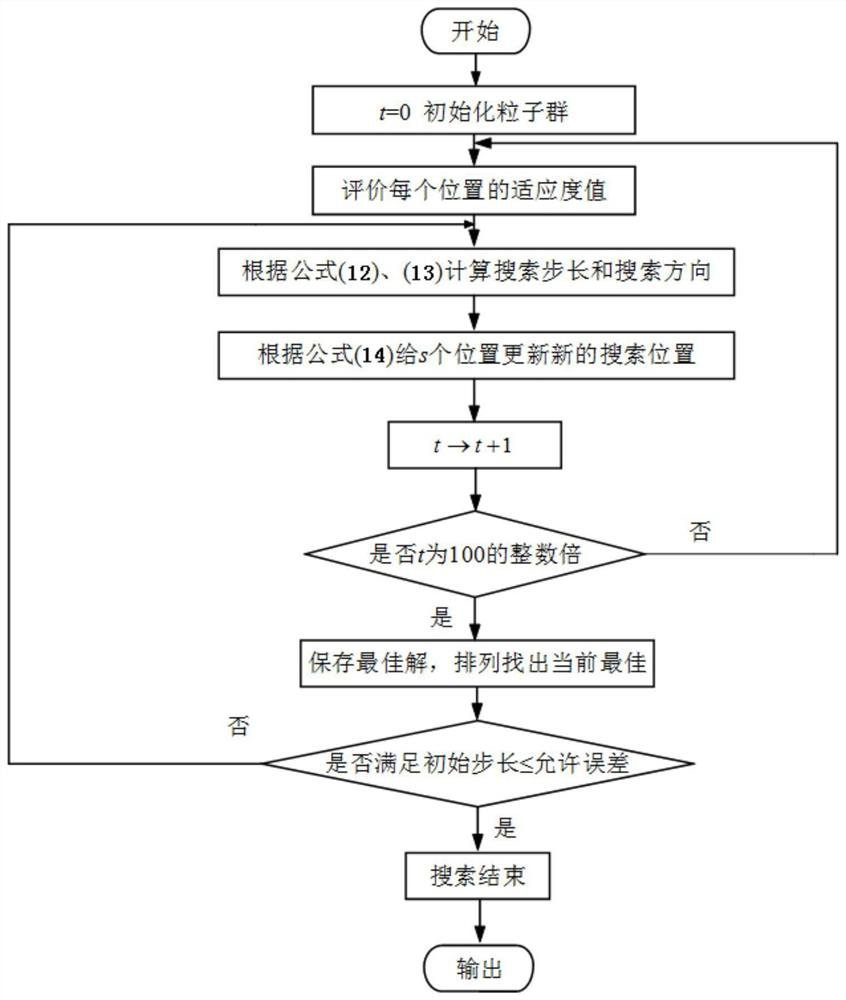
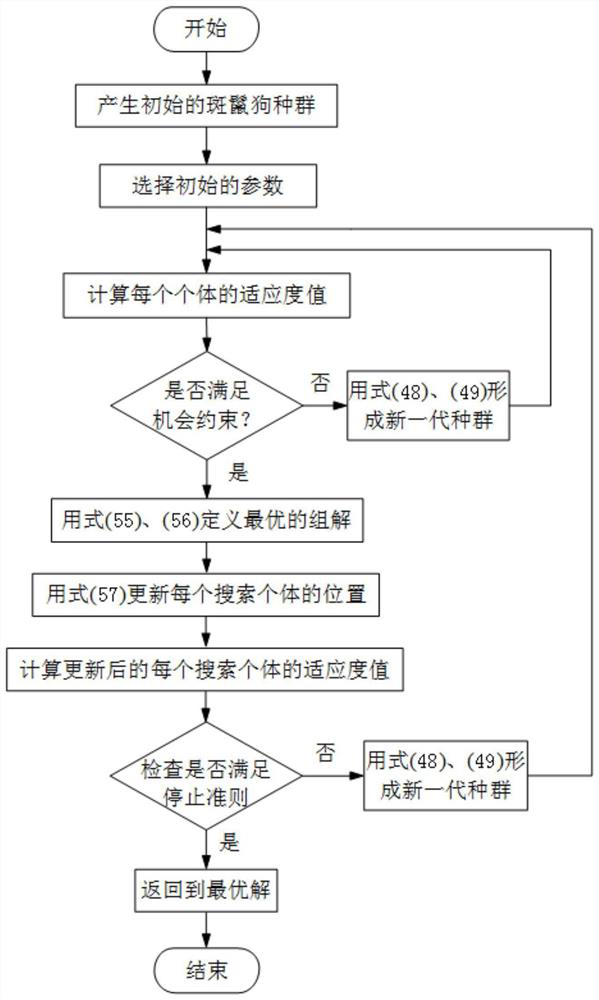
[0043] Aiming at the hybrid energy storage system composed of batteries and supercapacitors, the present invention proposes a double-layer coordinated control method for the hybrid energy storage system to stabilize wind power fluctuations, which will improve the crowd search algorithm, support vector regression machine, W-M filter method, and self-adaptive water injection algorithm Combined with the SH optimization algorithm, the two-layer coordinated control of HESS can reduce the number of deep charging and deep discharging of hybrid energy storage equipment, improve equipment utilization, prolong service life, and have good economic benefits.
[0044] The two-layer coordinated control method for the hybrid energy storage system to stabilize wind power fluctuations includes the following steps:
[0045] (1) Prediction by Supp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com