Brushless motor Hall position correction method based on Hall sensor
A Hall sensor, Hall position technology, applied in the direction of electronic commutator, monitoring commutation, etc., can solve the problems of large current, sensitivity error, low motor efficiency, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
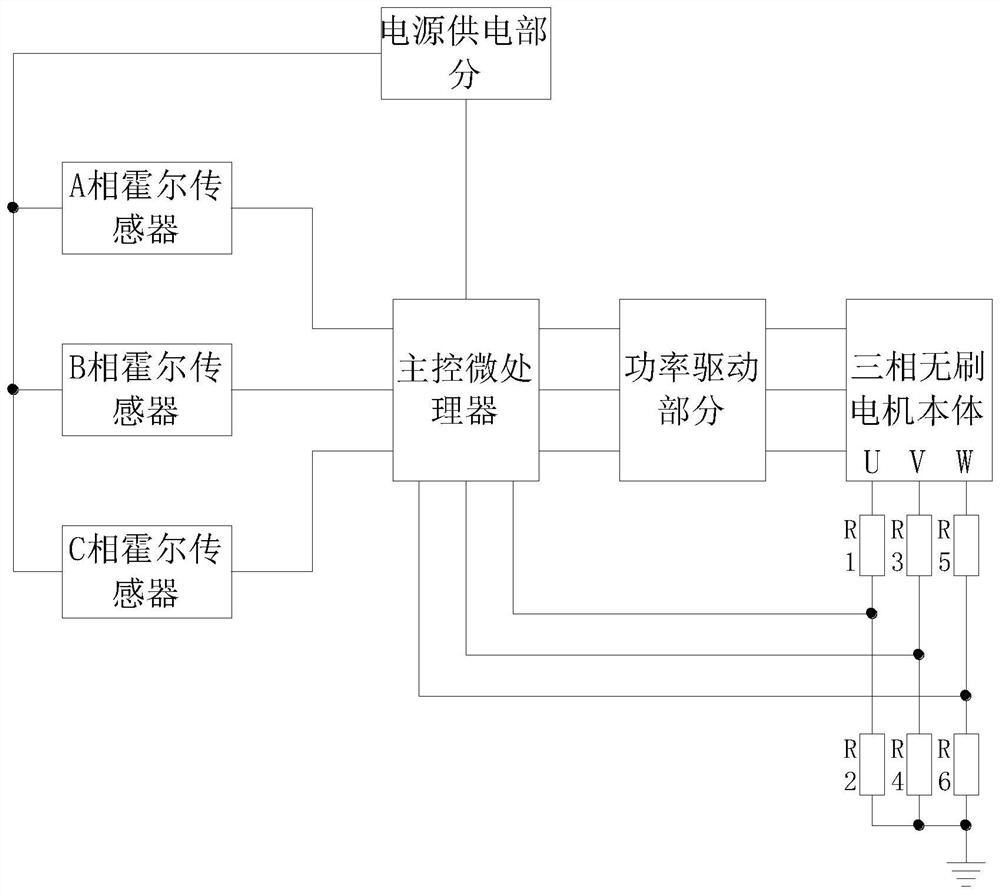
[0031] Step 1: Connect the three-phase brushless motor to the power supply of the motor. After the connection is completed, start the motor. After starting the motor, check whether there is any abnormality in the Hall signal. If there is no abnormality, calculate the Hall electrical angle and check whether the motor is running. The following situations occur: stalling, shaking, reverse rotation, stalling or large fluctuations in speed. If none of the above situations occurs, it is judged that the motor is operating normally, and the Hall electrical angle is determined by the formula Calculate, wherein the value of T1 is 0, and the value of T2 is 30, then it can be obtained that the angle is 180 degrees.
[0032] Step 2: Correct the Hall position of the motor according to the signal collected by the Hall sensor. By connecting a resistor with the same resistance value on the DC bus, two current samples are taken within one pulse width modulation cycle to compensate for the non-o...
Embodiment 2
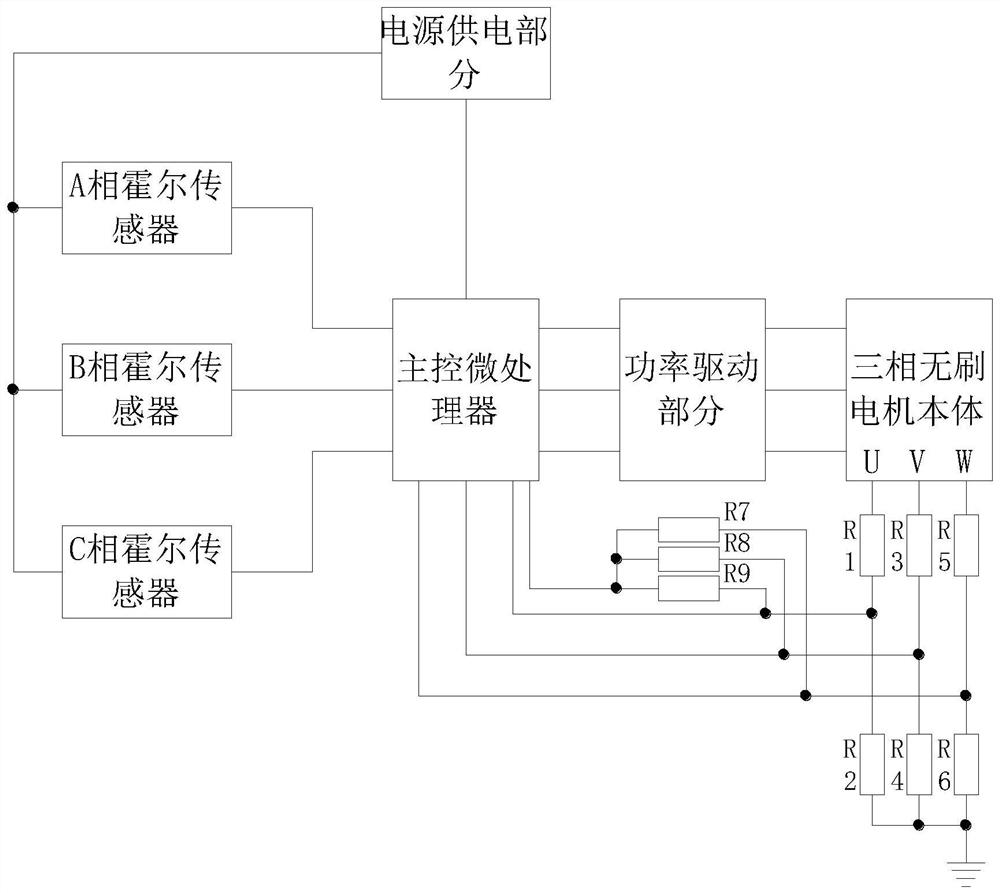
[0036] Step 1: Connect the three-phase brushless motor to the power supply of the motor. After the connection is completed, start the motor. After starting the motor, check whether there is any abnormality in the Hall signal. If there is no abnormality, calculate the Hall electrical angle and check whether the motor is running. The following situations occur: stalling, shaking, reverse rotation, stalling or large fluctuations in speed. If none of the above situations occurs, it is judged that the motor is operating normally, and the Hall electrical angle is determined by the formula Calculate, wherein the value of T1 is 0, and the value of T2 is 20, then it can be obtained that the angle is 120 degrees.
[0037] Step 2: Correct the Hall position of the motor according to the signal collected by the Hall sensor. By connecting a resistor with the same resistance value on the DC bus, two current samples are taken within one pulse width modulation cycle to compensate for the non-o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com