Robot arm for self-adaptive pressure reduction tunnel type robot
A tunnel-type, robotic technology, applied in the direction of surgical robots, applications, surgical manipulators, etc., can solve the problems of cumbersome installation of surgical operation plate, influence on the promotion of new technologies, and single function, so as to improve the implementation progress, improve the angle of soft tissue ablation, The effect of satisfying the need for stress reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
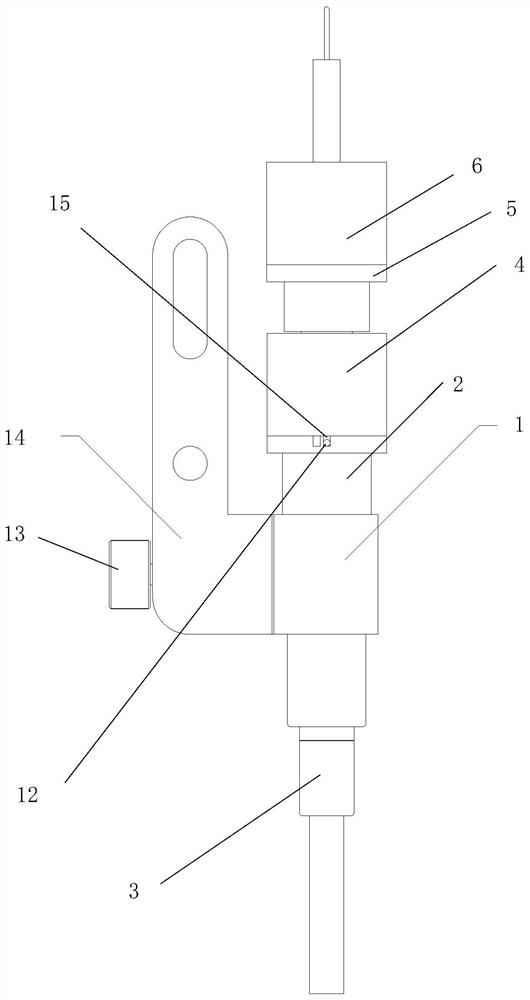
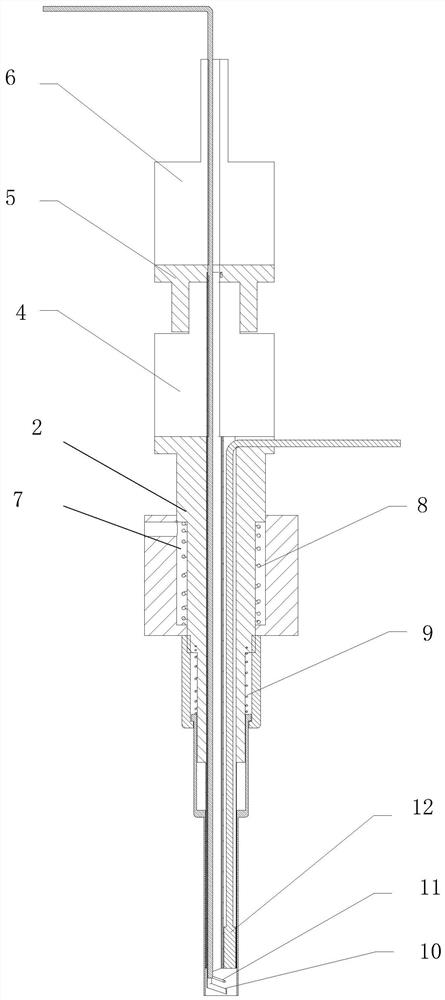
[0029] Such as Figures 1 to 2 A self-adaptive decompression tunnel-type robotic robot arm, including the machine head connecting seat 1, is different in that: in order to achieve effective guidance and vibration reduction, avoid unnecessary vibration, and improve surgical accuracy, the machine A buffer assembly is arranged on the head connection seat 1 . At the same time, considering the precise control of the longitudinal extension, the buffer assembly is provided with a telescopic column 2 , and a working channel 3 is provided below the telescopic column 2 . Moreover, in order to realize the axial rotation control and satisfy the precise axial positioning during the u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More