

A soft bionic robot and soft crawler
A bionic robot and software technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems affecting the motion performance and functionality of the robot, occupying a large space for the driver, and occupying the volume of the robot, so as to optimize the mechanical properties of bending motion and reduce the mass. , the effect of high energy density
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
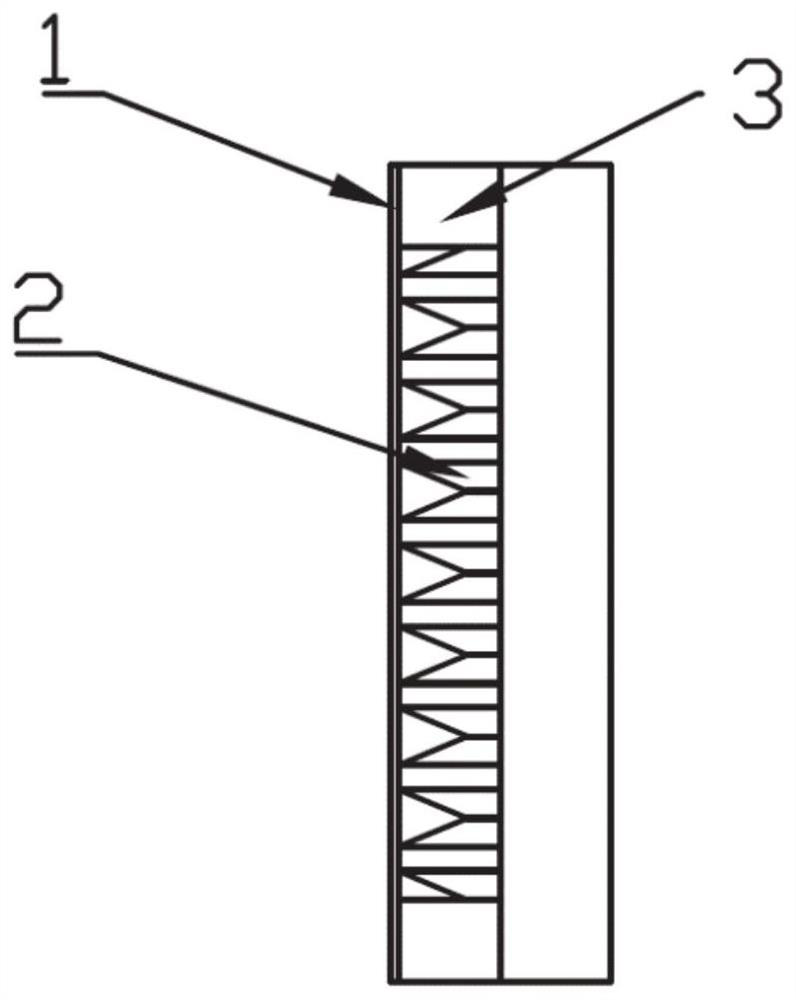
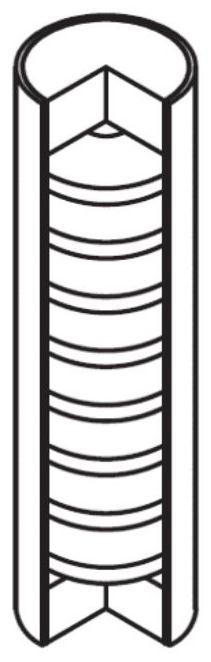
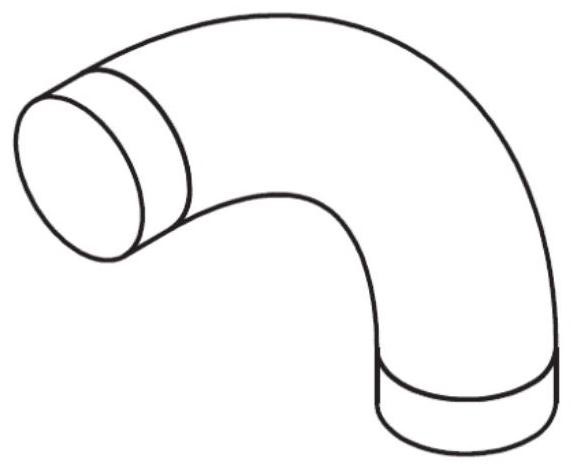
[0026] like figure 1 , figure 2 and image 3 As shown, this embodiment provides a soft bionic robot finger, including an outer layer 1 of a dielectric elastomer artificial muscle, an inner support 2 of a silicone elastomer and two sealing covers 3; wherein the outer layer 1 of a dielectric elastomer artificial muscle A sealing cover 3 is provided on each of the two ends to form a cylindrical structure; the internal support 2 of the silicone elastomer includes a plurality of disc-shaped support sheets, and a plurality of disc-shaped support sheets are stacked on the cylindrical structure. A cylindrical shape is also formed inside, and the disc-shaped support sheets at both ends are bonded together with the sealing cover. At the same time, the sealing cover 3 and the outer layer 1 of the dielectric elastomer artificial muscle are also pasted together to form an installation space for the disc-shaped support piece; the diameter of the disc-shaped support piece is slightly smal...
Embodiment 2
[0036] This embodiment also discloses a soft crawler, which includes an outer layer of a dielectric elastomer artificial muscle, an inner support of the silicone elastomer, two sealing covers and a driving mechanism; the inner support of the silicone elastomer includes a plurality of circular A disc-shaped support sheet, a plurality of disc-shaped support sheets are stacked together to form a cylindrical structure; the dielectric elastomer artificial muscle is wound around the outer ring of the cylindrical structure to form a cylindrical outer layer, and both ends of the cylindrical outer layer are provided with An airtight cap for sealing. The driving mechanism provides an external electric field for the dielectric elastomer material to drive the software crawler to crawl.
[0037] Specifically, flexible electrodes are respectively provided on the inner surface and the outer surface of the outer layer of the dielectric elastomer artificial muscle, and the flexible electrodes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More