

Double-mass impact type pipeline robot driven by non-circular gears and motion modeling method
A pipeline robot, non-circular gear technology, applied in the direction of pipe components, special pipes, mechanical equipment, etc., can solve the problems of difficulty in miniaturization and inapplicability, and achieve the effect of increasing mobile performance and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Exemplary embodiments, features, and aspects of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
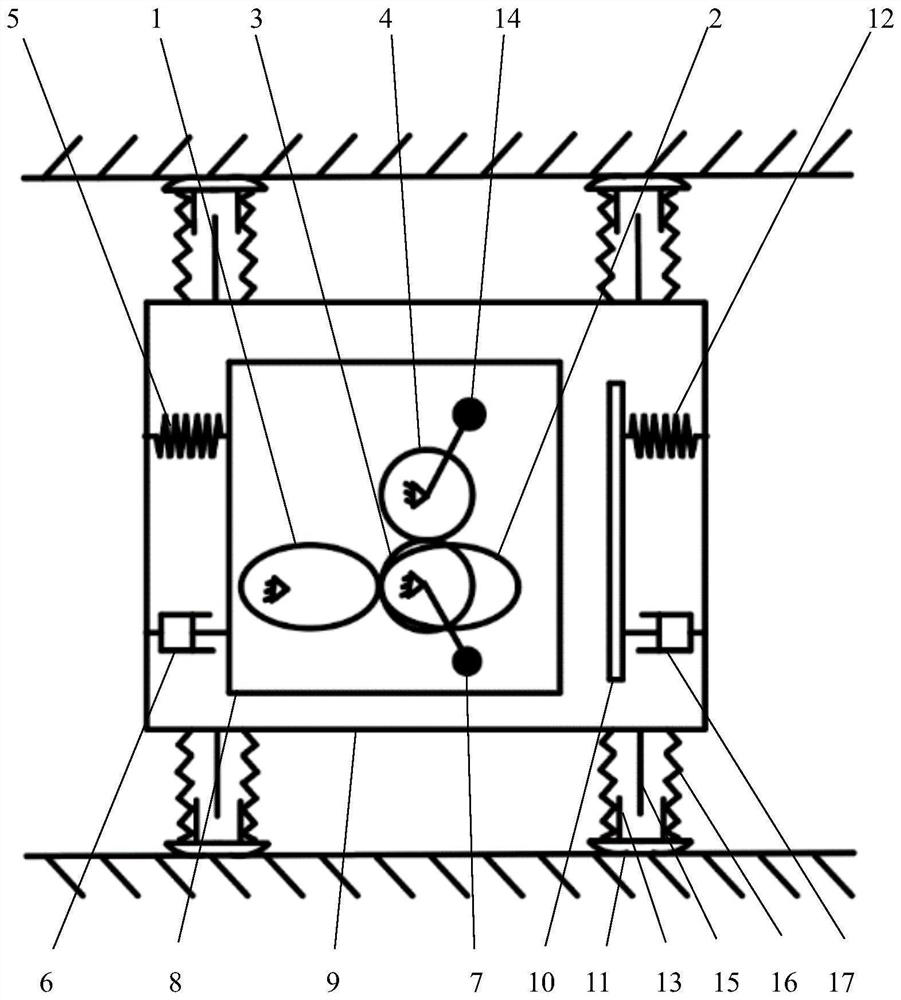
[0045] Specifically, the structure diagram of the two-mass impact pipeline robot is as follows: figure 1 As shown, the driving non-circular gear 1 is installed on the output shaft of the motor through a flat key, and the driven non-circular gear 2 and the synchronous spur gear 3 and the lower eccentric block 7 are installed on the same transmission shaft by means of the same flat key. The gear 4 and the upper eccentric block 14 are installed on the same transmission shaft through the same flat key. The line connecting the rotation centers of the driving non-circular gear 1 and the driven...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More