

A UAV Autonomous Combat System Based on Computer Generated Forces
A UAV and computer technology, applied in the field of UAV autonomous combat systems, can solve the problems of incomplete autonomous performance, low information processing accuracy, poor reliability, etc., to enhance active cognitive behavior, easy to modularize and The effect of engineering realization and good versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
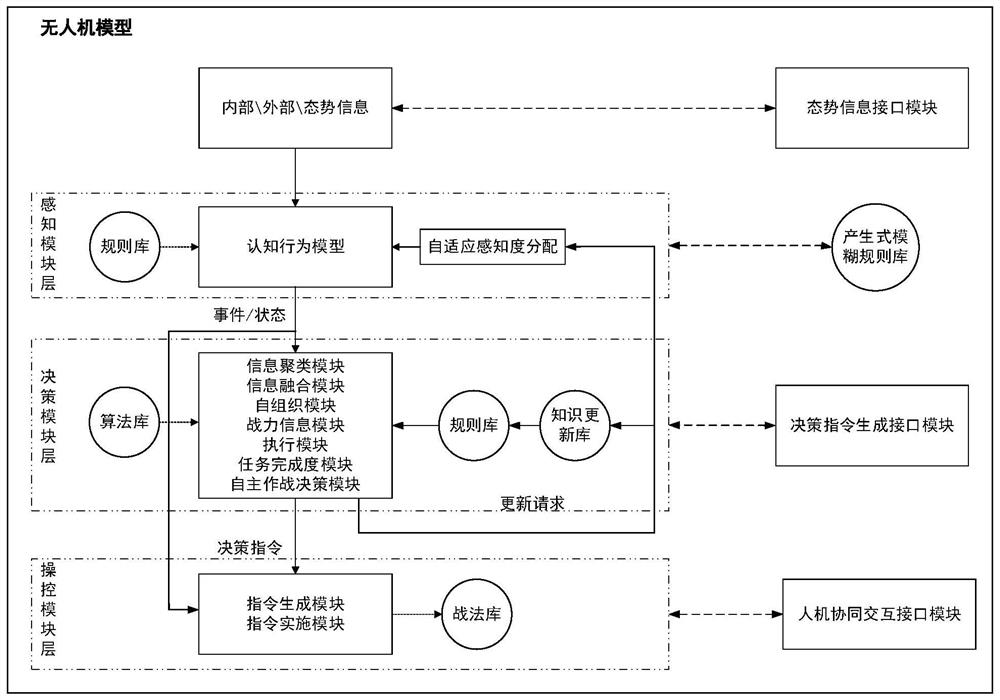
[0043] Specific implementation mode one: refer to figure 1 and figure 2 Describe this embodiment in detail, a UAV autonomous combat system based on computer-generated forces described in this embodiment is characterized in that it includes: a perception module layer, a decision-making module layer and an operation module layer;
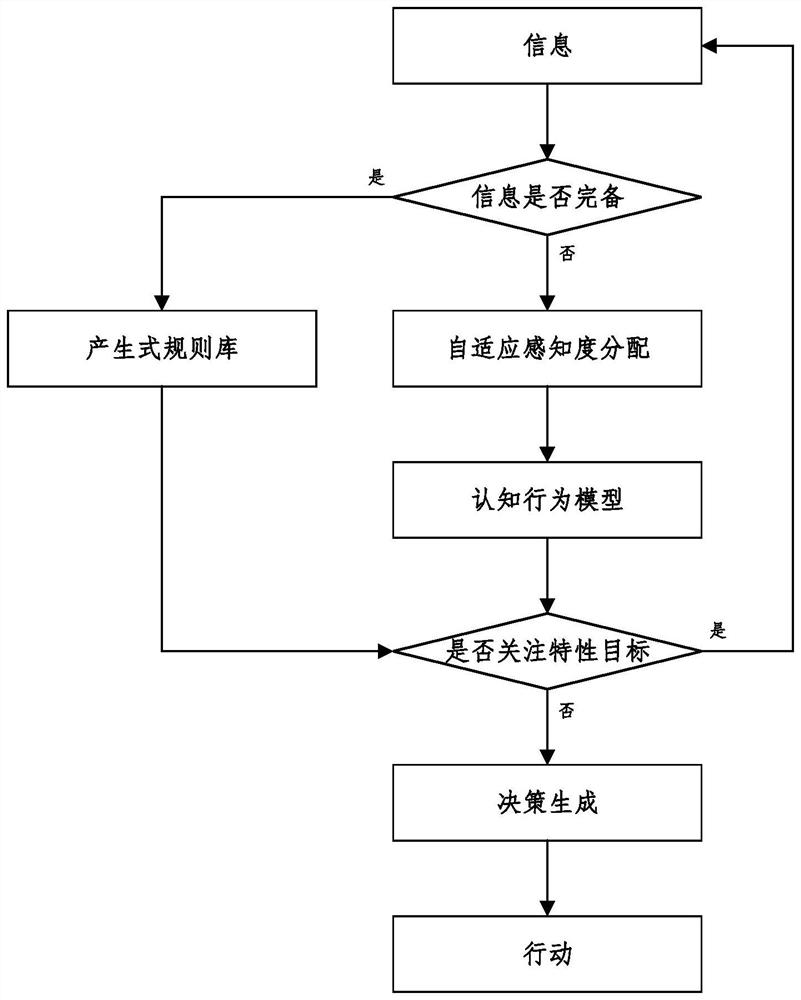
[0044] The perception module layer is used to receive and preprocess the situation information of the current environment, and convert the situation information into the form of events and states. If the events and states can directly correspond to the operation instruction input of the operation module layer, the events and The status is sent to the operation module layer, otherwise the event and status are sent to the decision module layer;
[0045] The decision-making module layer receives the events and states of the perception module, and classifies the events and states, and according to the production rules in each category module, the inform...
specific Embodiment approach 2
[0048] Embodiment 2: This embodiment is a further description of Embodiment 1. The difference between this embodiment and Embodiment 1 is that the system also includes a resource layer and a functional module layer;
[0049] The resource layer is used to provide the required data package for the UAV model;
[0050] The functional module layer is used to provide a functional interface for the UAV model.
specific Embodiment approach 3
[0051] Specific embodiment three: This embodiment is a further description of specific embodiment two. The difference between this embodiment and specific embodiment two is that the data package includes tactics program package, production fuzzy rule program package, optimization algorithm data package and Knowledge Update Packets.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More