Unmanned aerial vehicle laser point cloud efficient acquisition and processing method
A laser point cloud, high-efficiency acquisition technology, applied in image data processing, computer parts, radio wave measurement systems, etc. Easy to collect and easy to operate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
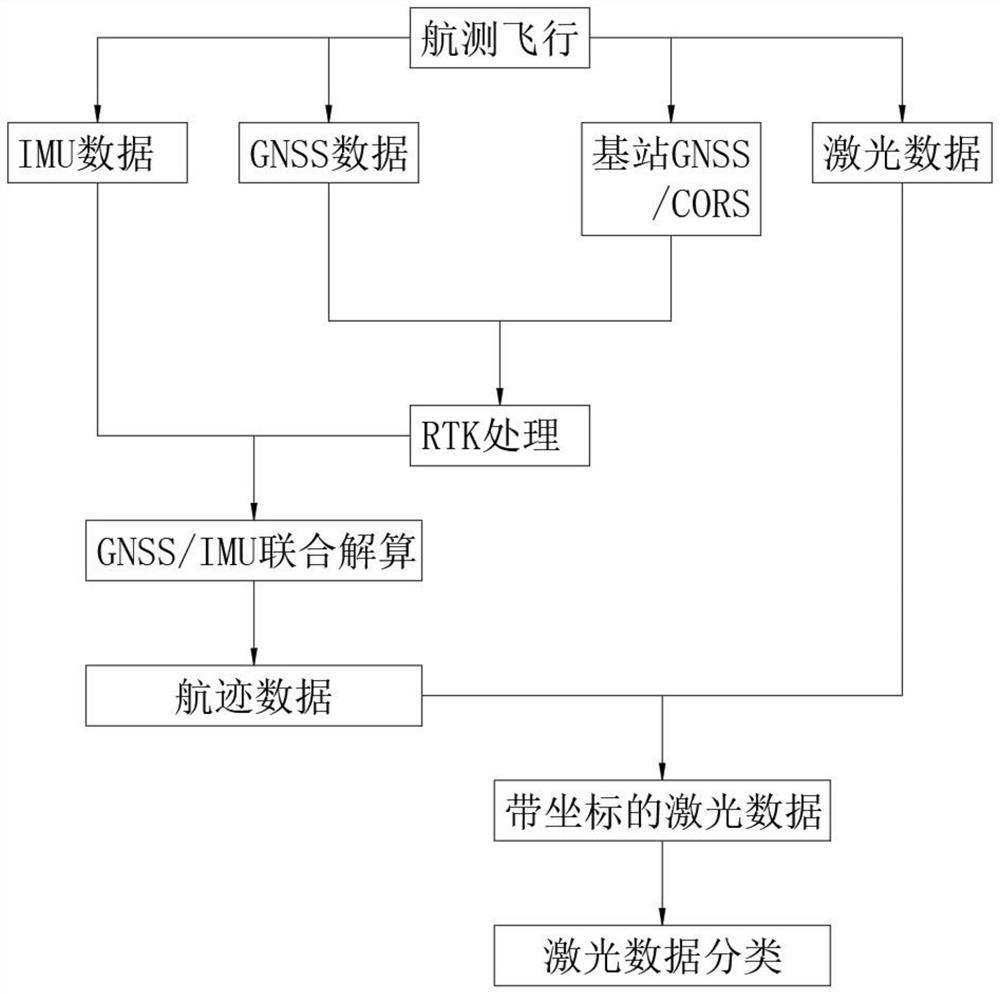
[0035] see figure 1 , the present invention provides a technical solution: a method for efficiently collecting and processing UAV laser point clouds, including:
[0036] S1. UAV equipment equipped with laser scanner, GNSS high-precision positioning system, MEMS inertial navigation system, IMU system, high-speed data acquisition and storage system and full-frame camera is used to fly according to the preset regional orbit, and do route planning to quickly obtain High-precision point cloud data to ensure the accuracy and comprehensiveness of the data;
[0037] S2. Through synchronously acquired 3D high-precision laser radar data and imaging technology, 3D high-precision laser point cloud and orthophoto image registration algorithm, the precise exposure time position and attitude information of the orthographic image is obtained, and the rapid acquisition and integration of DOM results is completed. Accuracy registration, realizing the accuracy of visible light data without cont...
Embodiment 2
[0049] This embodiment is further optimized on the basis of Embodiment 1. Under the condition of uncertainties in the system model and noise statistical characteristics, the application of Kalman filtering is subject to some restrictions, and H∞ filtering can be used to effectively To solve the problems encountered by Kalman filtering, H∞ filtering has high estimation accuracy and robustness. When the noise is colored noise with unknown statistical characteristics or the system has uncertainty, the filtering result of H∞ filter is higher than that of As a result of Kalman filtering, the filtering results of the H∞ filter have high stability, and the filtering effect has always been very good. At this time, the performance of the H∞ filter with good robustness is significantly better than that of the Kalman filter, which further improves the accuracy of the data. Accuracy is close to the actual numerical parameters. The other parts of this embodiment are the same as those of Emb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More