

Digestive endoscopy robot
A digestive endoscope and robot technology, applied in surgical robots, endoscopes, gastroscopes, etc., can solve problems such as secretion, vomitus or excreta pollution, difficulty in accurately controlling the movement of the endoscope, affecting the quality of inspection or treatment, etc. , to avoid the risk of contamination, reduce misoperation, and achieve the effect of high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
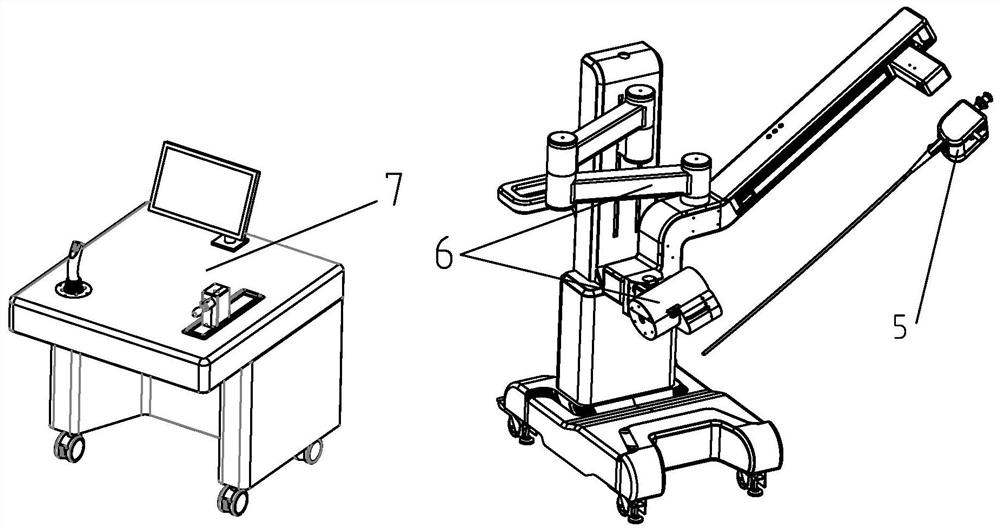
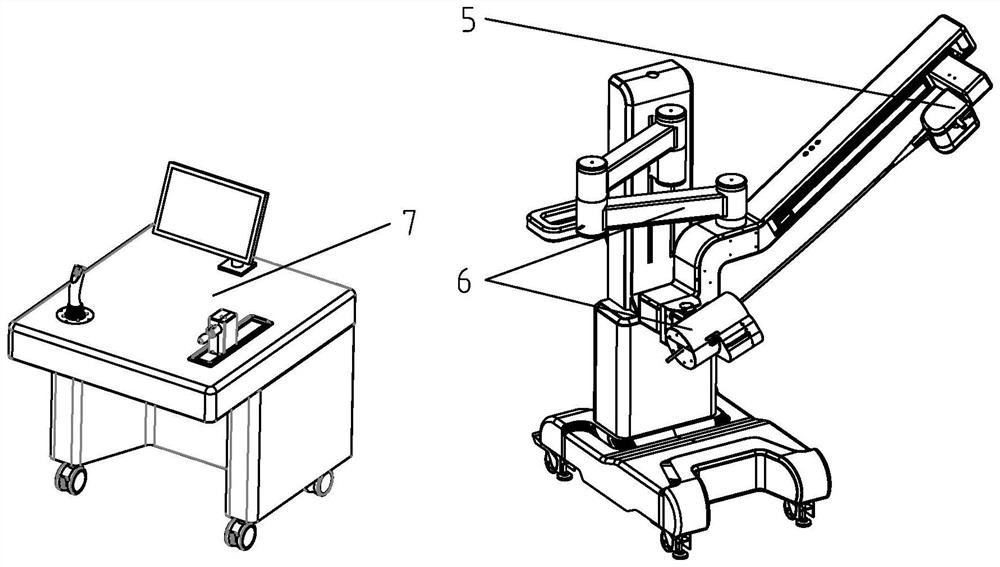
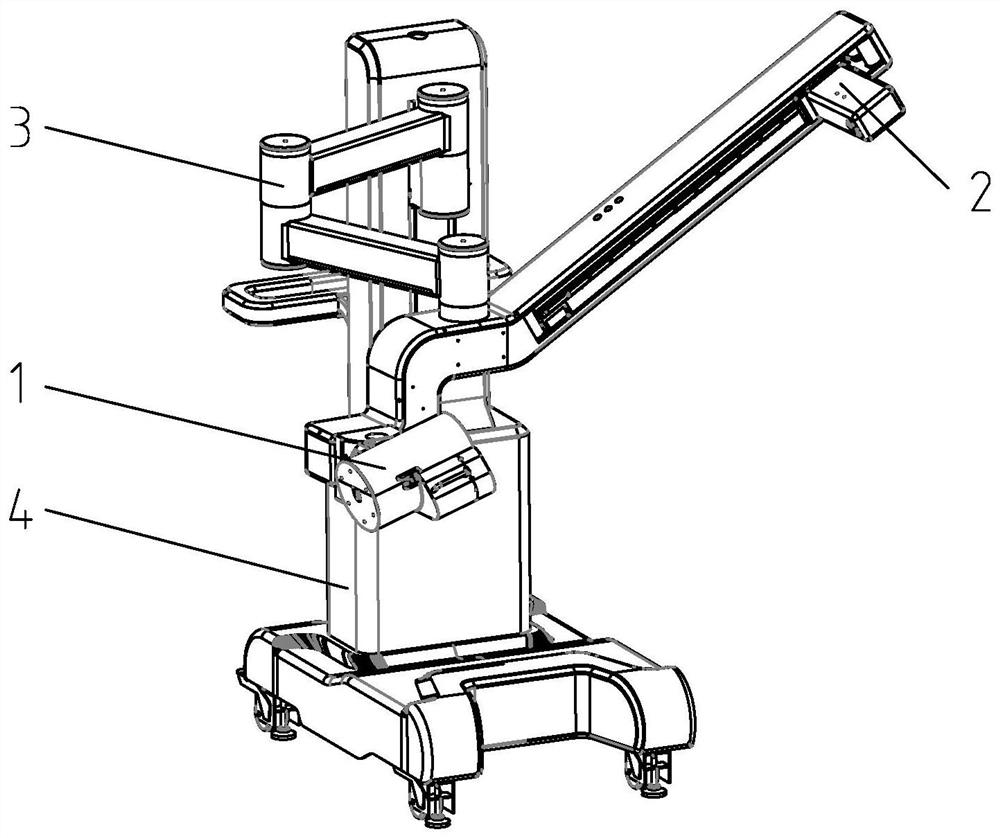
[0015] Specific implementation mode one: combine Figure 1 to Figure 18 This embodiment is described. This embodiment includes a mechanical arm system 6, an endoscope body pushing device and an endoscope body 5. The endoscope body 5 is detachably installed on the endoscope body pushing device, which is convenient for disinfection and avoids secondary Pollution; the mechanical arm system 6 includes a conveying device 1, a rotating mechanism 2, an adjustable mechanical arm 3 and a base 4, the adjustable mechanical arm 3 is installed on the base 4, and the conveying device 1 and the rotating mechanism 2 are installed on the adjustable mechanical arm Both sides of the end of the arm 3; the adjustable mechanical arm 3 includes an "S" shaped special-shaped arm 35, and the top of the special-shaped arm 35 extends obliquely to the upper right, and its function is to make the endoscope installed The overall center of gravity of the special-shaped arm 35 of the mirror body pushing devic...
specific Embodiment approach 2
[0019] Specific implementation mode two: combination Figure 4 Describe this embodiment, the endoscopic mirror body pushing device of this embodiment comprises fixed housing 10 and feeding mechanism 12, and feeding mechanism 12 is installed in fixed housing 10, and feeding mechanism 12 comprises feeding motor 1212, transmission mechanism and two Two clamping and moving mechanisms; two said clamping and moving mechanisms are driven by the transmission mechanism driven by the feed motor 1212, and move in opposite directions respectively, and one said clamping and moving mechanism is in clamping state, the other clamping movement mechanism is in a released state. The continuous feeding of the endoscope is realized through the cooperative cooperation of the two clamping and moving mechanisms, one opening and one closing, and the whole pushing process is stable. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0020] Specific implementation mode three: combination Figure 7 Describe this embodiment, the clamping movement mechanism of this embodiment includes a horizontal movement bracket 1219, a cylinder 1220 and a cylinder jaw 1221, the cylinder 1220 and the cylinder jaw 1221 are installed on the horizontal movement bracket 1219, and the cylinder 1220 is controlled by ventilation and deflation. The opening and closing of the cylinder jaws 1221 , the cylinder jaws 1221 are used to clamp the body of the endoscope, and the horizontal movement bracket 1219 is connected with the transmission mechanism to achieve horizontal movement relative to the fixed housing 10 . With such a setting, driven by the cylinder, the clamp jaws of the cylinder can be quickly opened and closed, and then pushed by the horizontal moving bracket, so the operation is flexible and reliable. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More