

Hierarchical control system and method for lower limb prosthesis based on multi-source information of unaffected leg
A layered control system and multi-source information technology, applied in prosthetics, medical science, diagnosis, etc., can solve problems such as difficulty in ensuring accuracy, changes in prosthetic pace, continuous adjustment of pace, etc., to ensure safety and comfort , Smooth and natural movement, accurate detection effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in detail below with reference to specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that, for those skilled in the art, several changes and improvements can be made without departing from the inventive concept. These all belong to the protection scope of the present invention.
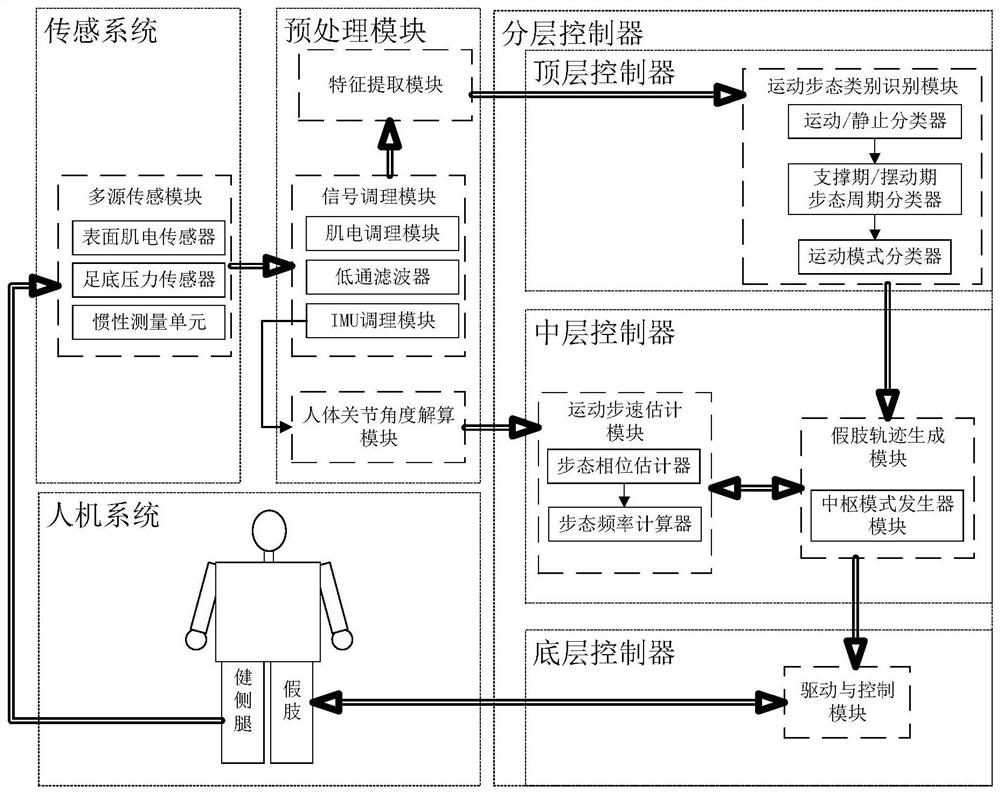
[0055] The embodiment of the present invention provides a layered control system for lower limb prosthesis based on multi-source information of the unaffected leg, refer to figure 1 As shown, the system specifically includes: a human-machine system module, a sensor system module, a signal preprocessing module and a layered controller.
[0056] First of all, the human-machine system module includes one side of the human-machine healthy leg and one side of the prosthetic limb, regardless of left and right. The se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More