

Indoor moving target positioning method and device and computer equipment
A technology of moving targets and positioning methods, applied in the field of indoor positioning, which can solve problems such as filter divergence, wireless signal reflection, diffraction and refraction, and indoor positioning systems that cannot be used normally, and achieve strong robustness and good estimation effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
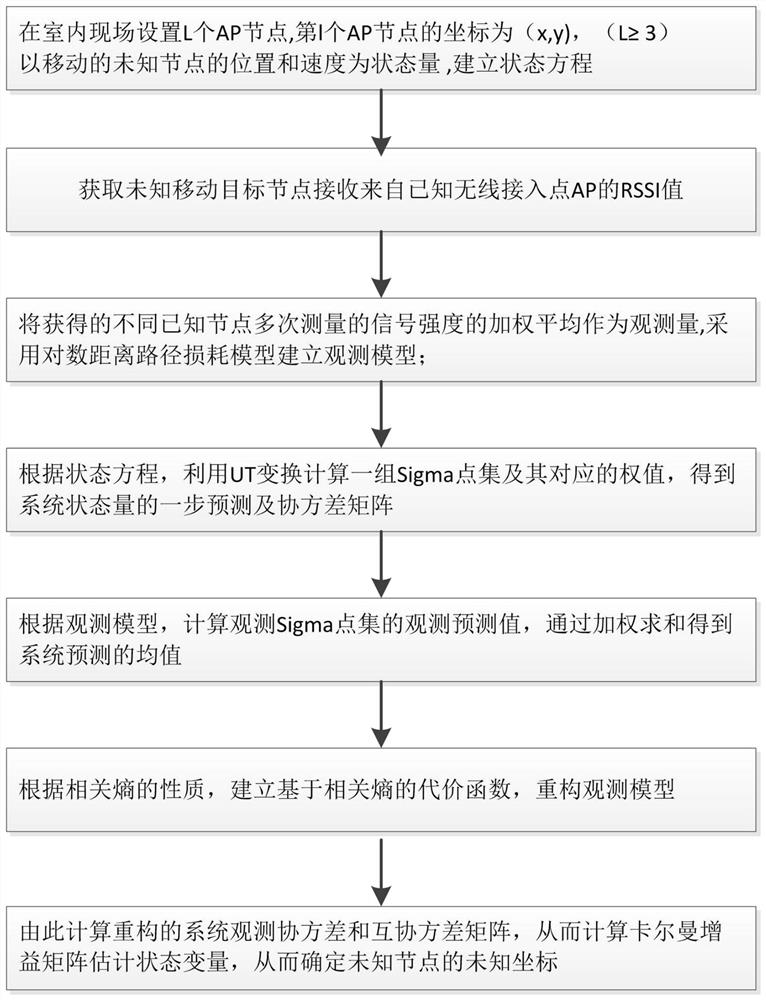
[0178] In order to fully verify the rationality of the proposed MCUKF method, a Zigbee indoor positioning system based on CC2530 is used for experiments. In the Zigbee indoor positioning system based on CC2530, there is an unknown node and four AP points, and the four AP points are randomly distributed. Determine the coordinates of the AP point. Then, the PC is used to collect signal strength data when the unknown node is stationary, and each point is collected for 3 minutes each time, and 50 sets of data are selected from it, and the distribution characteristics of the signal strength errors of the four APs received by the unknown node are tested and analyzed. According to Kolmogorov-Smirnov According to the analysis of test results, if the test rejects the null hypothesis at the 15% significant level, the signal intensities from the unknown node to the 4 APs are all non-normally distributed. The signal strength received by the unknown node from the AP presents a non-Gaussian...
Embodiment 2
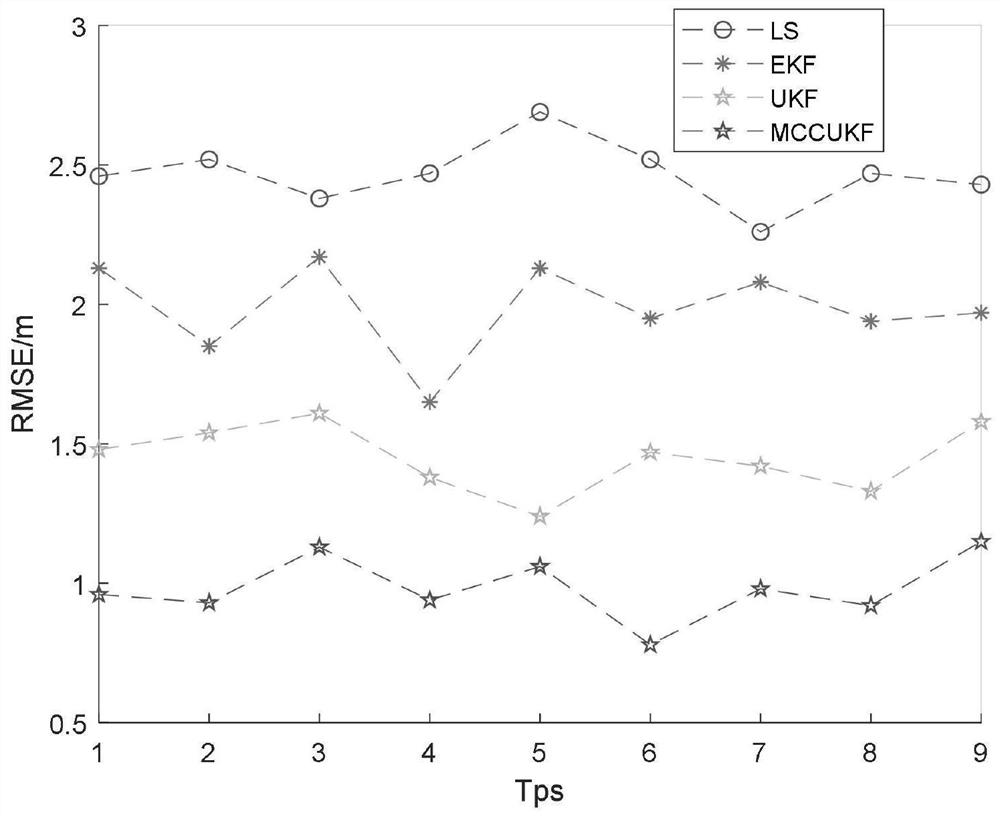
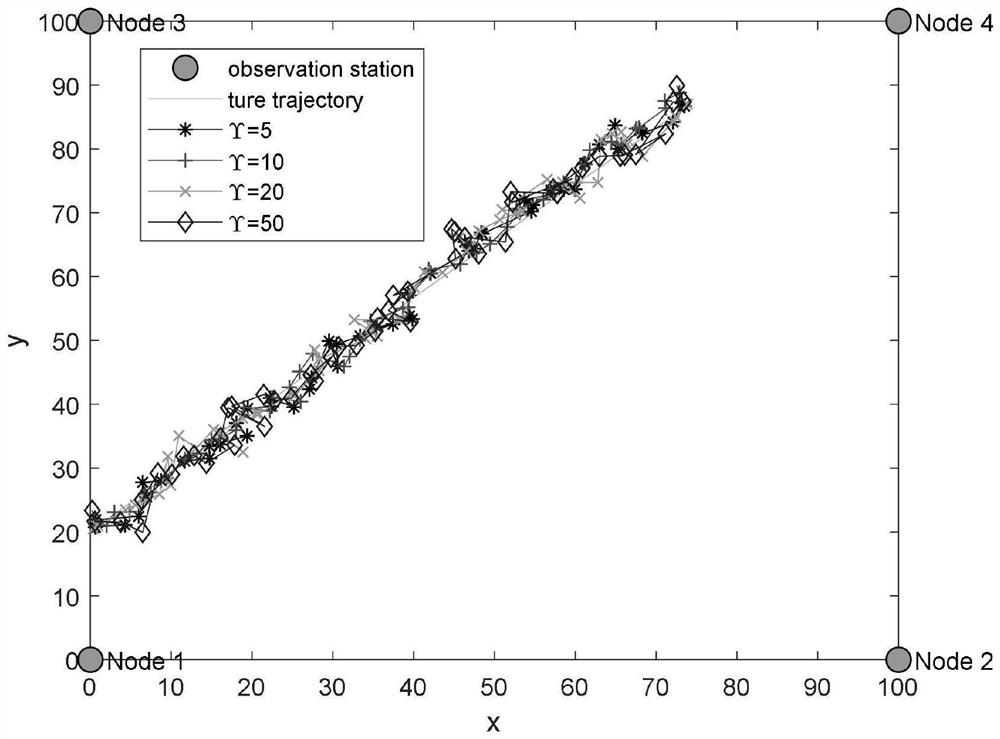
[0181] In the actual complex indoor environment, the positioning accuracy is often affected by non-Gaussian noise with multiple peaks and heavy tails, which will cause the accuracy of traditional nonlinear filtering algorithms to decrease or even diverge. The linear robust filtering method, the method proposed by the present invention introduces the maximum correlation entropy on the basis of the traditional nonlinear filtering UKF, so that the filtering has the robustness against non-Gaussian. The following is a specific simulation experiment to verify, and compare and analyze to select the appropriate core width. Deploy four APs in the indoor positioning area, and their corresponding coordinates are A1(0,0), A2(0,10), A3(10,0), A4(10,10), assuming the state of the unknown node in the experiment vector The initial real state is provided by LS (position unit m, speed unit m / s) The initial state estimation error covariance matrix is set as P(0∣0)=diag([1,0.5,1,0.5]), the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More