

Robot navigation method and device, computer equipment and storage medium
A navigation method and robot technology, applied in navigation computing tools, navigation, measuring devices, etc., can solve problems such as inability to navigate and decrease in positioning accuracy, and achieve the effects of avoiding inability to navigate, improving positioning accuracy, and good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
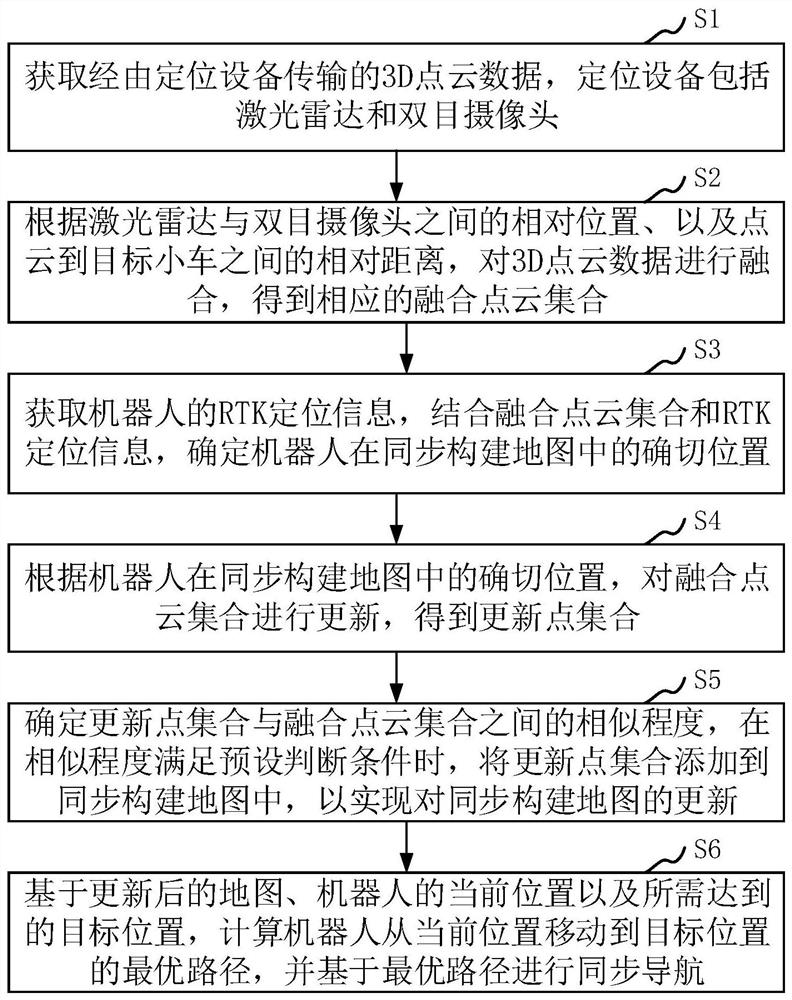
[0037] In one embodiment, such as figure 1 As shown, a navigation method based on 3D point cloud and deep learning is provided, and the method is applied to a robot controller (the robot controller is located on the robot, including algorithm firmware and hardware for algorithm operation) as an example. , including the following steps:
[0038] S1. Obtain 3D point cloud data transmitted via a positioning device, where the positioning device includes a laser radar and a binocular camera.
[0039] Specifically, the robot controller obtains 3D point cloud data from the lidar and the binocular camera. It should be noted that 3D point cloud data specifically refers to a set of vectors in a three-dimensional coordinate syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More