

Omnidirectional underwater robot
A technology of underwater robots and robots, applied in underwater ships, underwater operating equipment, motor vehicles, etc., can solve the problems of low degree of freedom, high energy consumption, difficult to control, etc., achieve compensation of current and cable resistance, and safe operation Reliable, Reliable Effects of Performance Improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0027] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
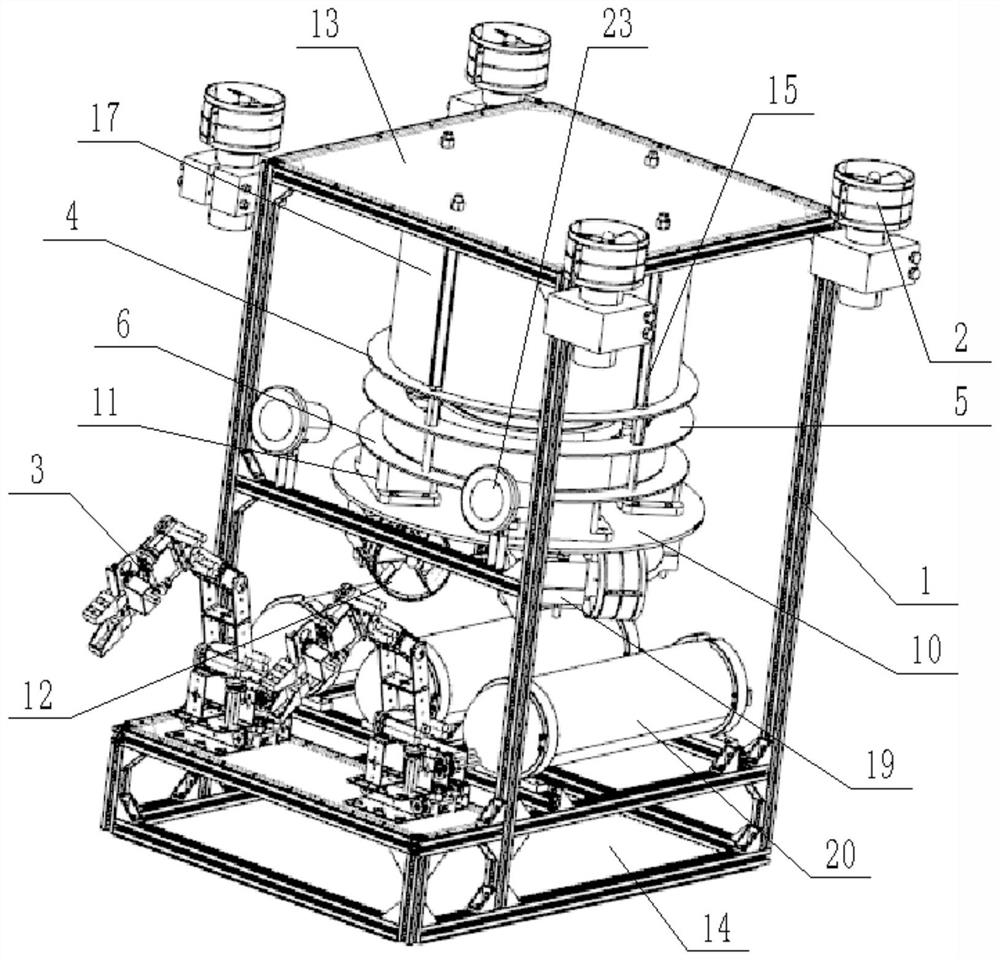
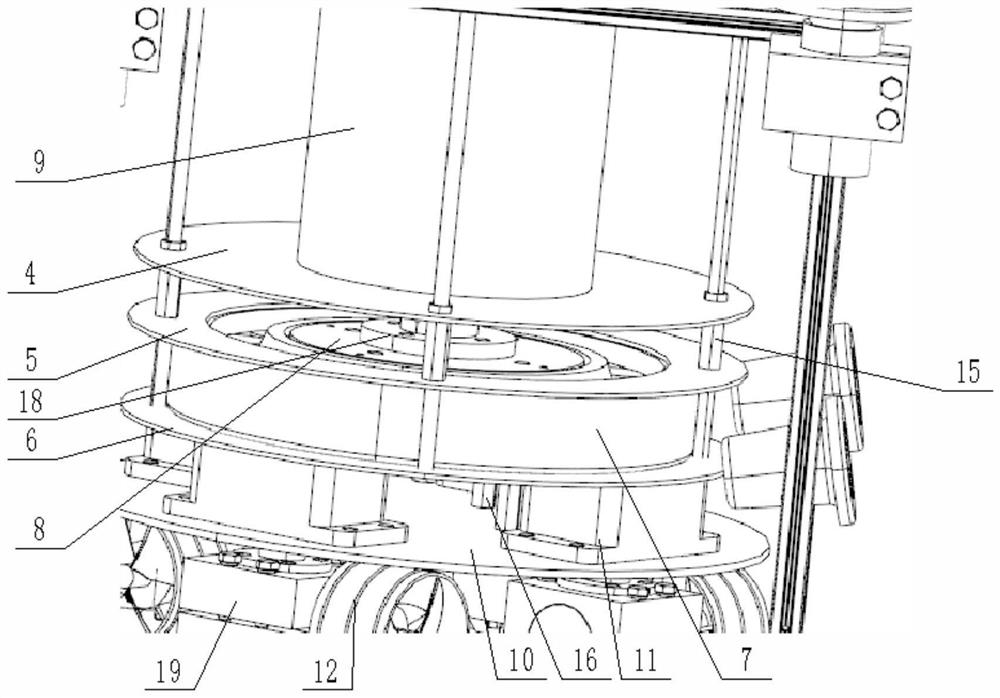
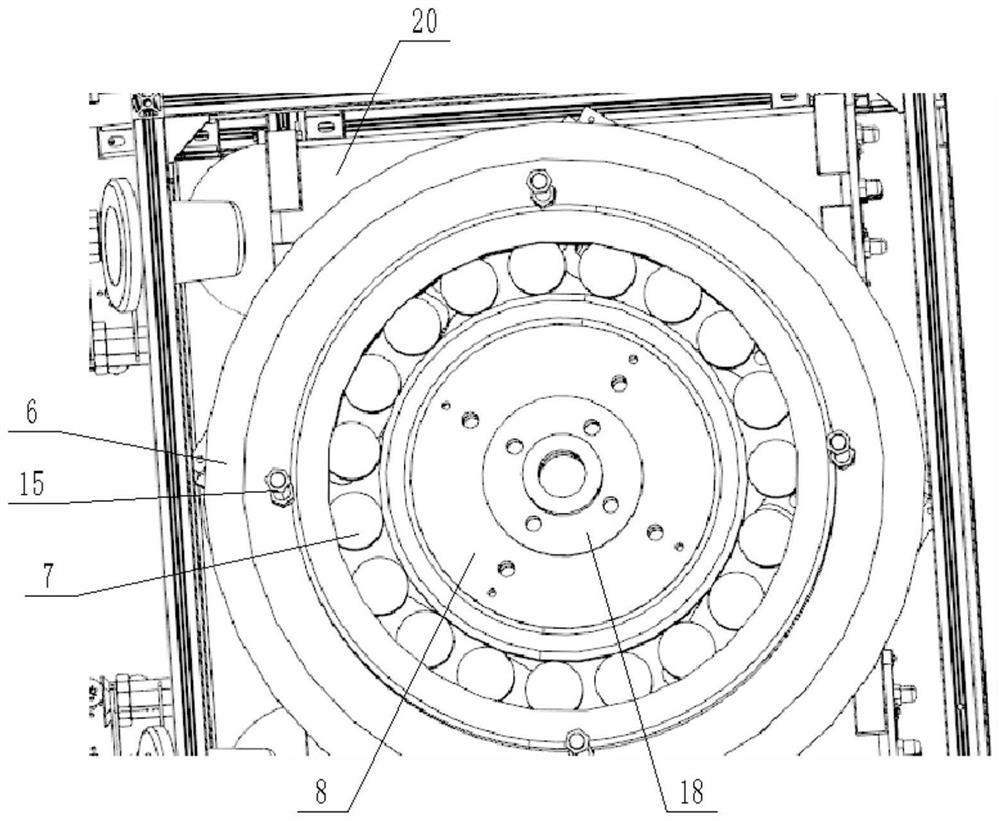
[0028] refer to Figure 1-5 , the present invention is applied to the technical fields of marine engineering and seabed resources development. After in-depth research on domestic related technologies, in order to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More