

Portable remote ultrasonic scanning system and safe ultrasonic scanning compliance control method
A portable, ultrasonic technology, which is applied in the directions of ultrasonic/sonic/infrasonic equipment control, ultrasonic/sonic/infrasonic diagnosis, ultrasonic/sonic/infrasonic Permian technology, etc. Inability to ensure the continuity of the end force, the inability to realize the control of the joint force and the smooth control of the whole process, etc., to achieve the effect of convenient scanning operation, simple structure and convenient portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
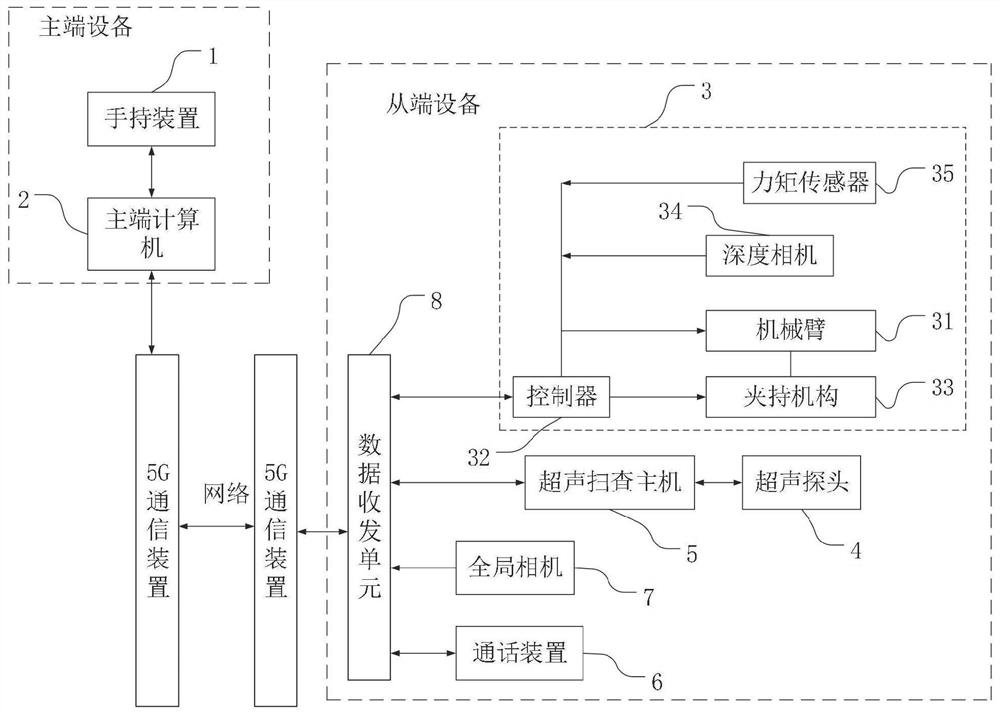
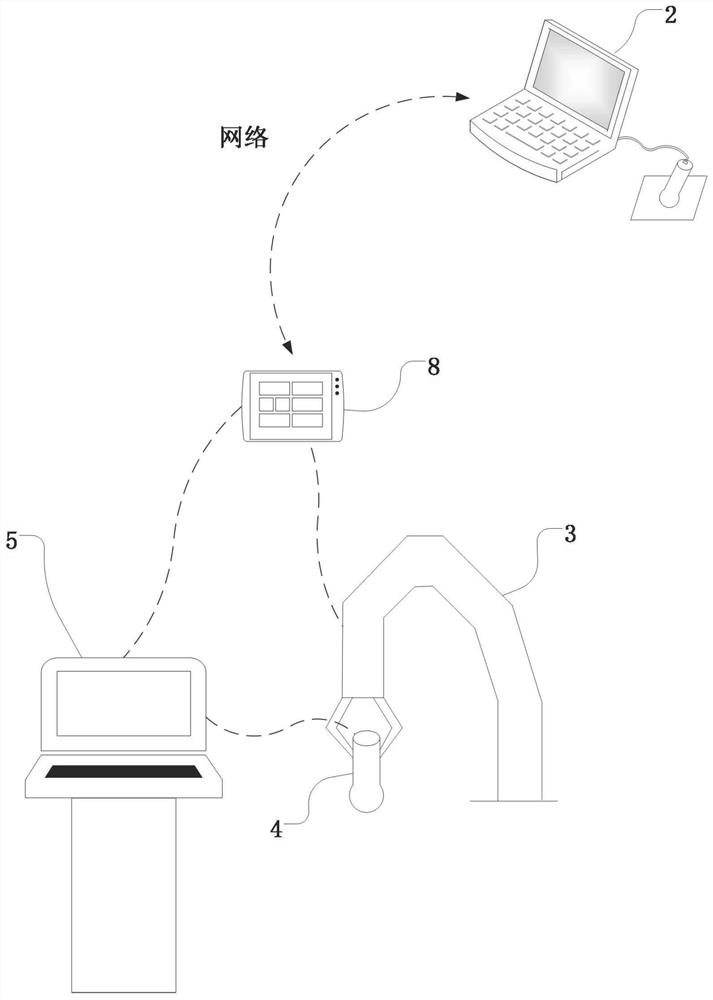
[0058] Depend on figure 1 and figure 2 As shown, a portable remote ultrasonic scanning system includes a master device and a slave device; wherein, the master device is a remote-controlled doctor's device, and the slave device is a patient device for ultrasonic scanning.
[0059] The host device includes: a handheld device 1 , and a host computer 2 connected to the handheld device 1 .
[0060] The slave end equipment includes: a slave end scanning robot, a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More