

Submarine sediment stratum space drilling robot
A kind of seabed sediment and robot technology, applied in the direction of drill bit, manipulator, drilling equipment, etc., can solve the problem that the drilling direction can only be perpendicular to the seabed plane, only one hole can be drilled, etc., to achieve good mobility and reduce drilling resistance. , the effect of improving athletic ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The following examples can make those skilled in the technical field understand the present invention more comprehensively, but do not limit the present invention in any way.
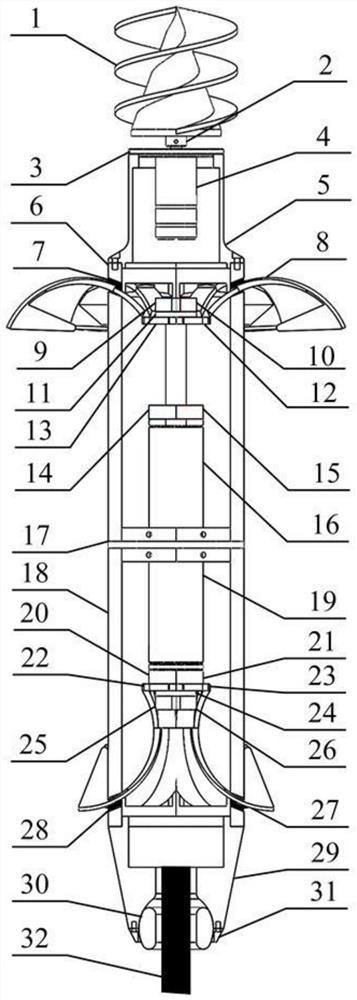
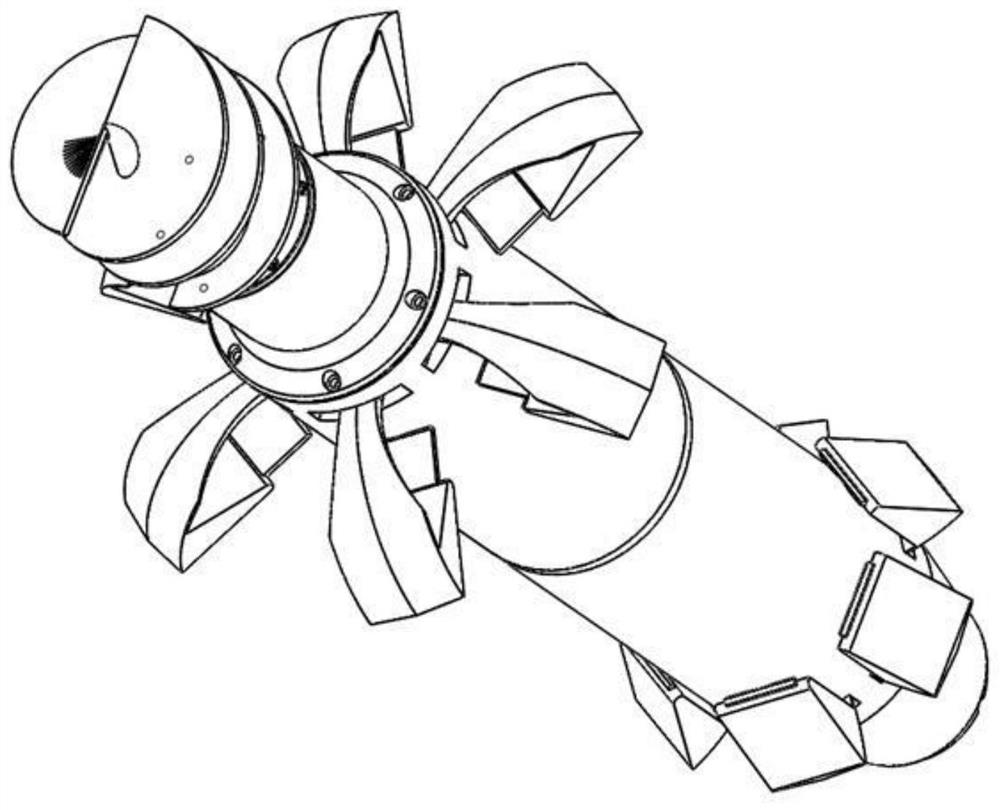
[0035] Such as figure 1 , The present invention is a multi-segment structure, including a lateral mud discharge drill bit mechanism, a front excavation support body segment, a rear excavation support body segment and a tail oil cable interface connected in sequence along the axis.
[0036] In the lateral mud discharge drill bit mechanism, the lateral mud discharge drill bit 1 has a conical core column and a cylindrical helical blade, the transmission system includes a hydraulic motor 4, and the hydraulic motor 4 is installed in the outer cylinder 5 of the drilling body segment. The transmission shaft passes through the flange 3 of the drilling body and is connected with the drill stem through the drill connector 2 .
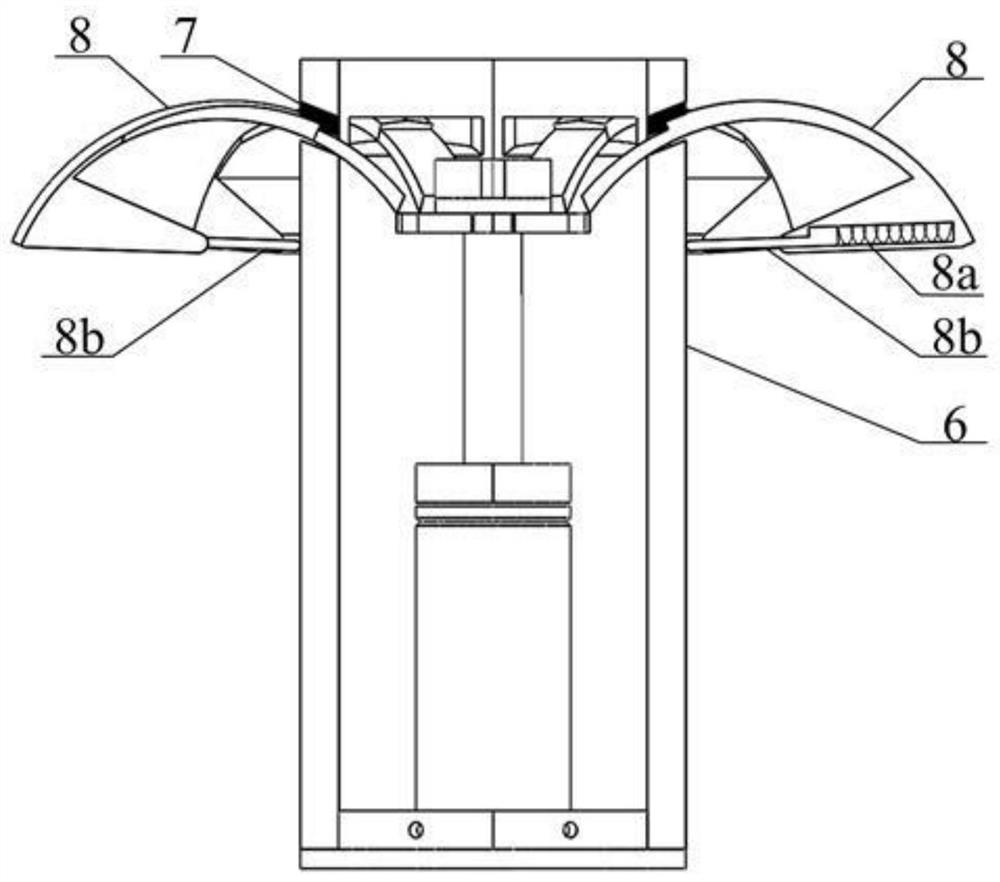
[0037]The front excavation propelling body section includes the front body sec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More