

Improved feature stereo matching method based on binocular vision
A technology of stereo matching and binocular vision, which is applied in the field of three-dimensional perspective, can solve the problems of insufficient parallax accuracy, low matching rate of weak texture, and unsmooth continuous parallax, etc., to achieve the goal of improving parallax accuracy, reducing algorithm complexity, and simplifying calculations Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0068] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
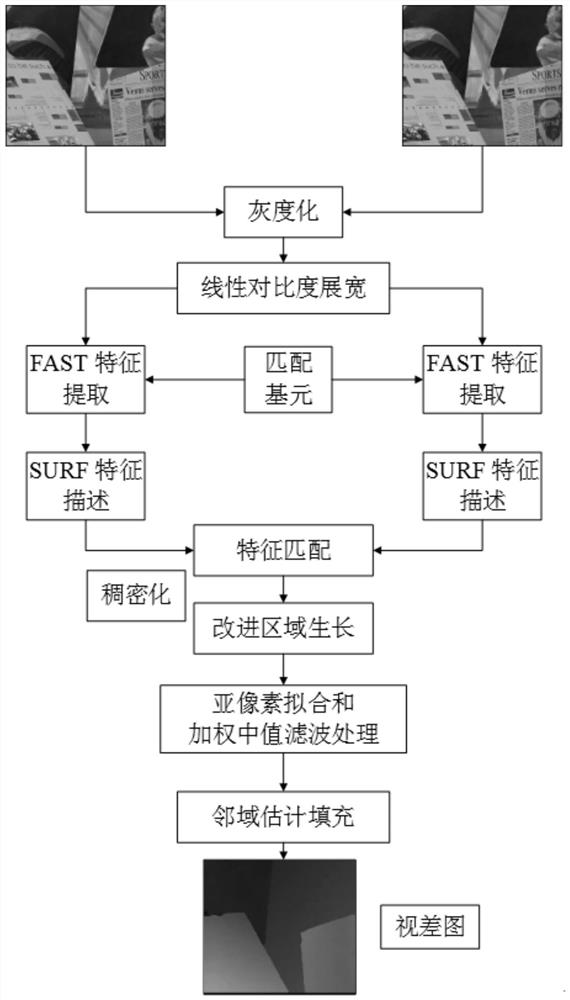
[0069] The present invention is an improved feature stereo matching method based on binocular vision. The purpose is to solve the problems that the feature stereo matching method can only obtain sparse parallax, low matching rate of weak texture, and insufficient parallax precision, which leads to unsmooth and step-like parallax continuous parts. An improved feature stereo matching method is proposed. Finally, a more accurate and dense parallax is obtained, which improves the matching effect between weak texture areas and depth discontinuities and the overall parallax accuracy; at the same time, it has strong robustness and can suppress the influence of certain brightness differences and noise. The details are as follows Steps to implement:
[0070] like figure 1 Shown:
[0071] 1) Image preprocessing:
[0072] Collect images from differe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More