A chuck type manipulator
A manipulator and collet-type technology, applied in the field of manipulators, can solve the problems of cumbersome loading and unloading operations, poor clamping effect, etc., and achieve good clamping effect and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
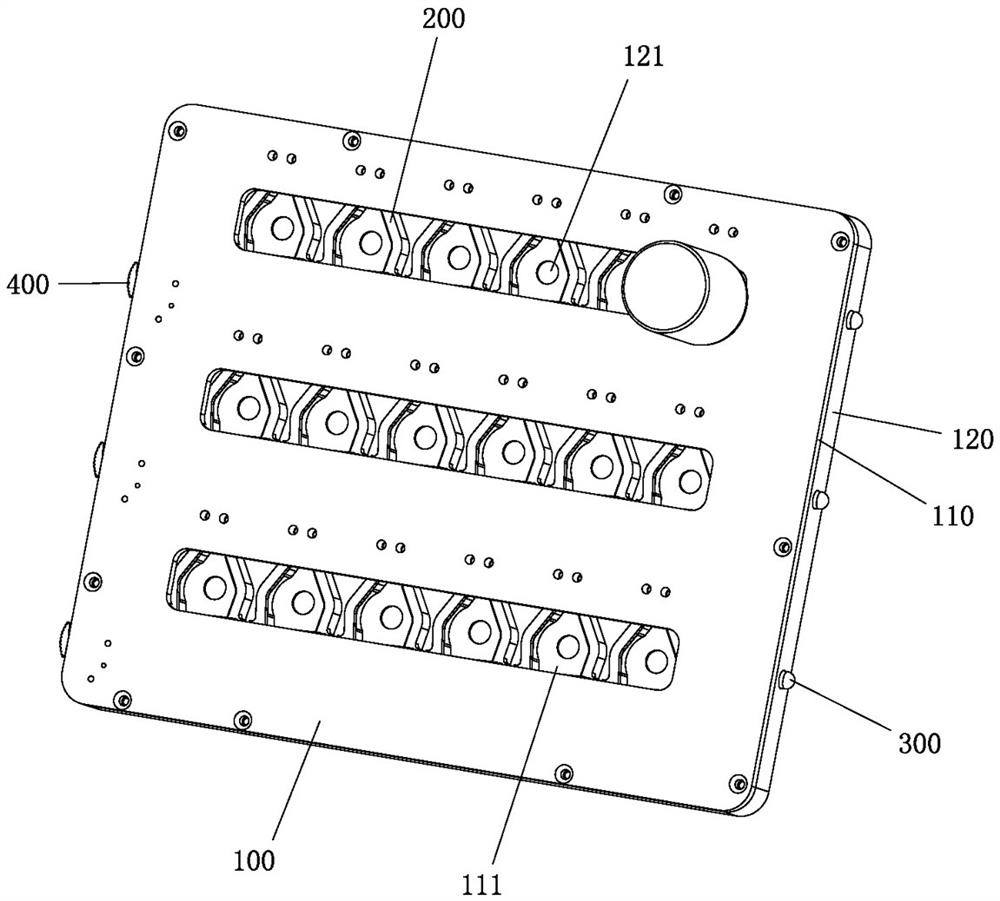
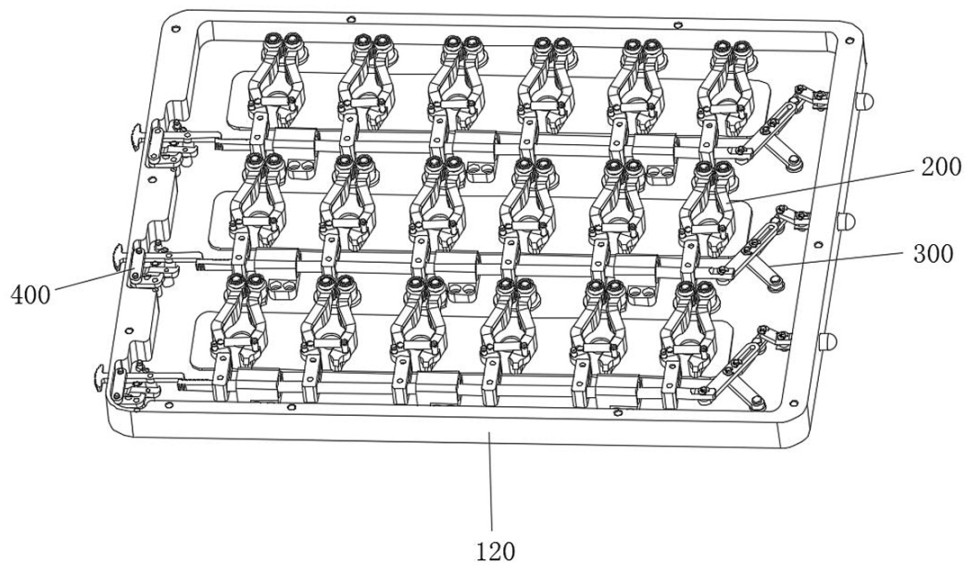
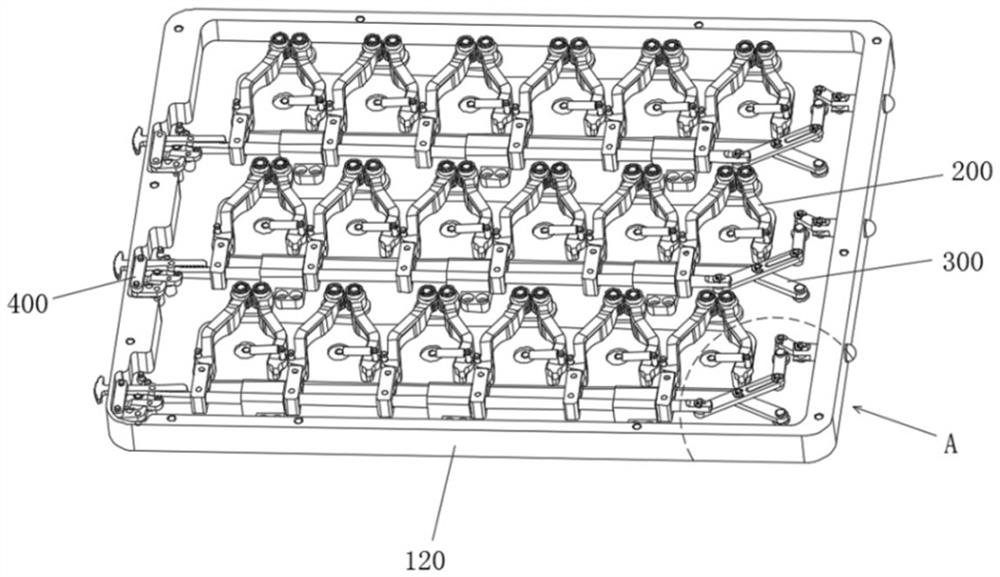
[0048] This embodiment provides a chuck type manipulator, which is used in the batch feeding, clamping and dispensing operations of a plurality of vials in the automation system, such as Figure 1-4 As shown, it includes a box body 100 , a chuck 200 , a linkage mechanism 300 and a limiting mechanism 400 .
[0049] Several collets 200 are arranged in the box body 100 and form one or more groups of linear distribution. In this embodiment, 18 collets 200 are taken as an example to introduce in detail, wherein 18 collets 200 are formed in a 3X6 manner. The three groups distributed in the longitudinal array, each group has a matching linkage mechanism 300 and a limit mechanism 400, and the three groups are basically similar in structure; the linkage mechanism 300 is used to drive one group of chucks 200 to open and close synchronously, and the limit mechanism The mechanism 400 is used for clamping limit and / or loosening limit of a group of chucks 200 .
[0050] The box body 100 co...
Embodiment 2
[0078] This embodiment provides a chuck type manipulator, such as Figure 8-10 As shown, the difference between this embodiment and Embodiment 1 is that the structure of the limiting mechanism is different.
[0079] The limiting mechanism 400 in this embodiment includes a slider 470, a holding button 480, a locking hook 490 and a third return spring 491;
[0080]The third return spring 491 is arranged on the box body 100, and the slider 470 is slidably arranged on the box body 100 and can compress the third return spring 491, wherein the sliding direction of the slider 470 is perpendicular to the sliding direction of the movable push rod 320;
[0081] The slider 470 is provided with a limiting connection groove 471 and a first guide slope 472 located at the notch of the limiting connecting groove 471, the locking clasp 490 is arranged on the movable push rod 320, and the locking clasp 490 can be connected with the first guide. The inclined surface 472 offsets and drives the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More