

Robot rapid assembly method and system based on near-end strategy optimization algorithm
An optimization algorithm and assembly method technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of fast and accurate assembly of robots, difficulty in reward function, difficulty in parameter selection, etc., and achieve good sample complexity and generalization. The effect of improving the generalization ability, improving the generalization ability, and improving the robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
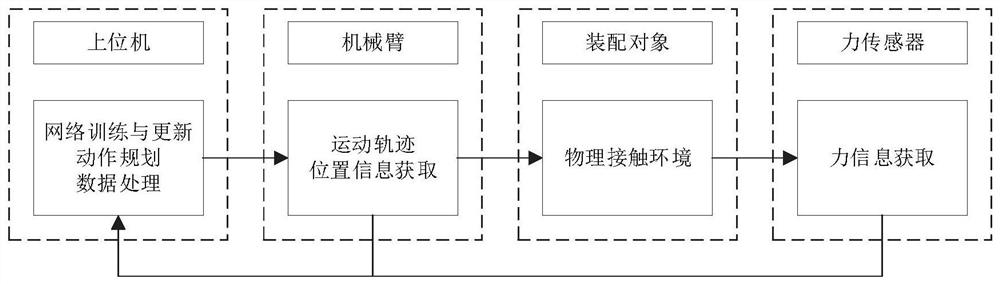
[0035] This embodiment discloses a robot rapid assembly system based on a proximal strategy optimization algorithm, such as figure 1 As shown, it consists of a six-dimensional force sensor at the end of the robotic arm, a host computer, a robotic arm, and complex assembly objects (electronic connectors such as USB and VGA). The six-dimensional force sensor is used to obtain the force and moment at the end of the manipulator, and feed back the force information to the host computer training network. The robotic arm is the main actuator, which is used to execute the actions output by the network. The assembly object is the main part of the physical contact environment, and the assembly strategies of different assembly objects are different. The upper computer trains the proximal strategy optimization algorithm network according to the status information fed back by the robot and the force sensor, and builds a fuzzy reward system.
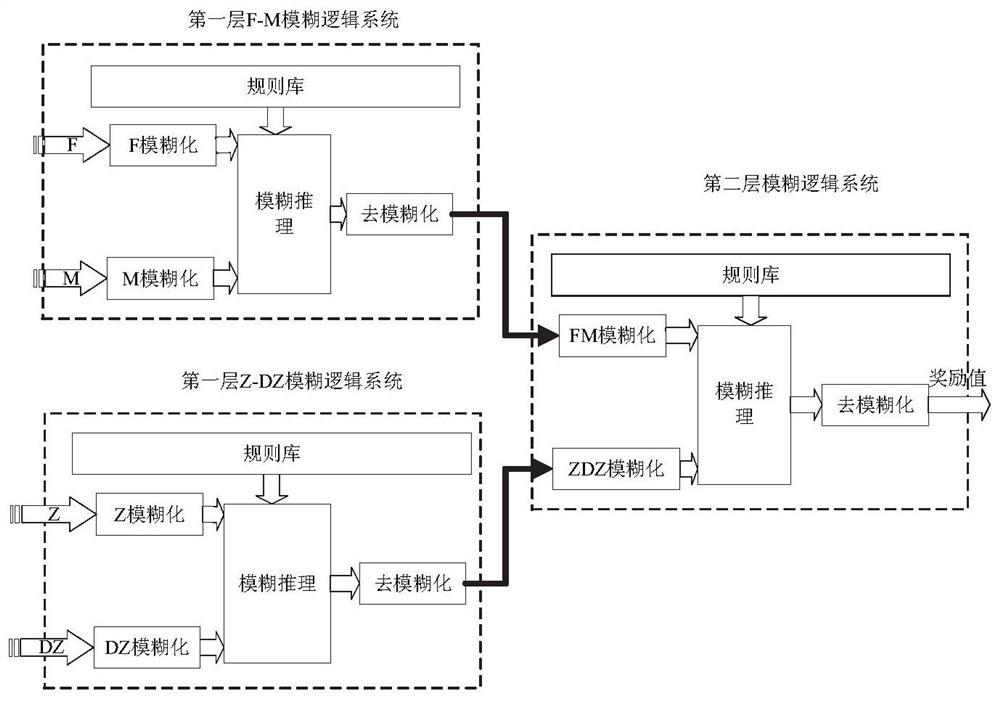
[0036] The above fuzzy reward system consists...
Embodiment 2
[0039] The purpose of this embodiment is to provide a robot rapid assembly method based on the proximal strategy optimization algorithm, including:
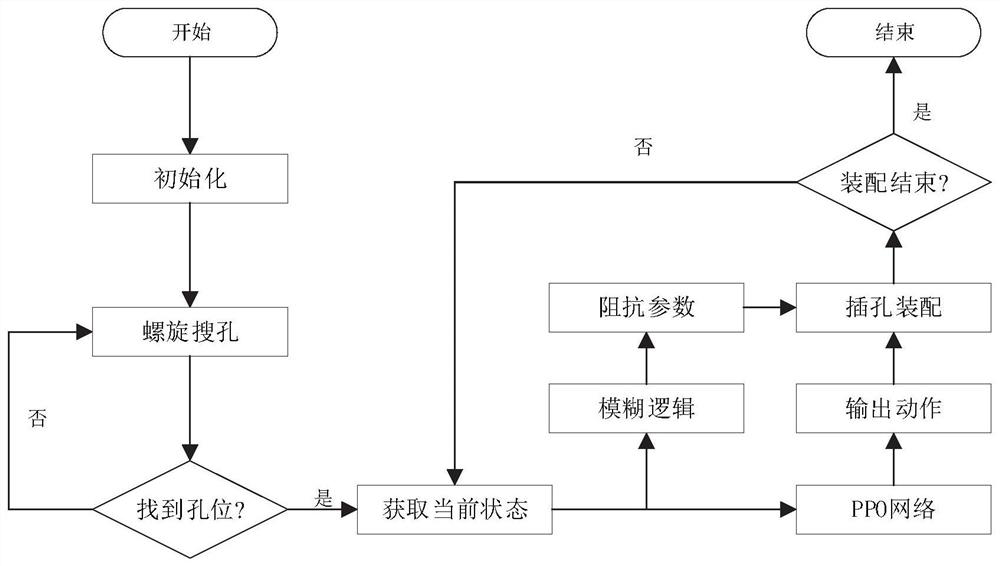
[0040] Control the manipulator to search for holes in a spiral, and judge whether the hole position is found. If so, obtain the current state and send it to the proximal strategy optimization algorithm network. The proximal strategy optimization algorithm network outputs the action command of the manipulator. hole assembly until the assembly is complete.
[0041] When the mechanical arm performs socket assembly based on the received instruction, it also performs fuzzy logic processing based on the obtained current state to obtain impedance parameters, and performs socket assembly based on the impedance parameter and the received instruction.
[0042] According to the proximal strategy optimization algorithm and combined with fuzzy logic, the present invention proposes a method capable of quickly assembling the shaft hole. This m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More