Joint calibration method for single-line laser radar and camera
A single-line laser radar and laser radar technology, applied in radio wave measurement systems, image data processing, instruments, etc., can solve the problems of invisible two-dimensional laser radar scanning lines, inability to accurately obtain positions and coordinates, and achieve simple and convenient calculation. , to ensure accuracy, to ensure the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
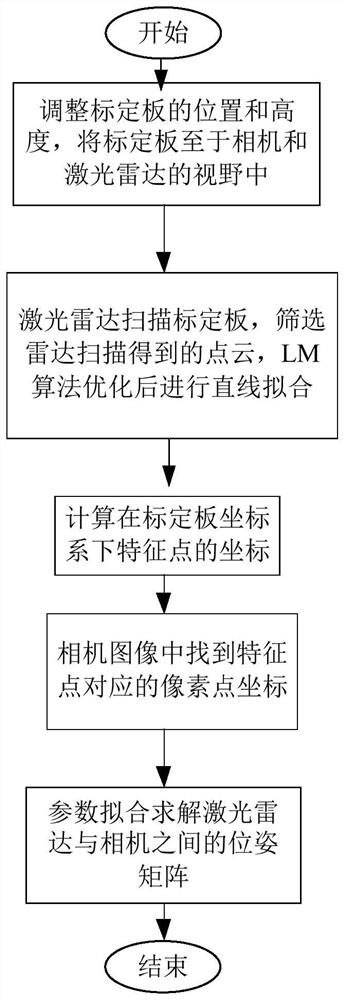
[0045] A single-wire laser radar and camera target joint design and calibration method, comprising the steps of:
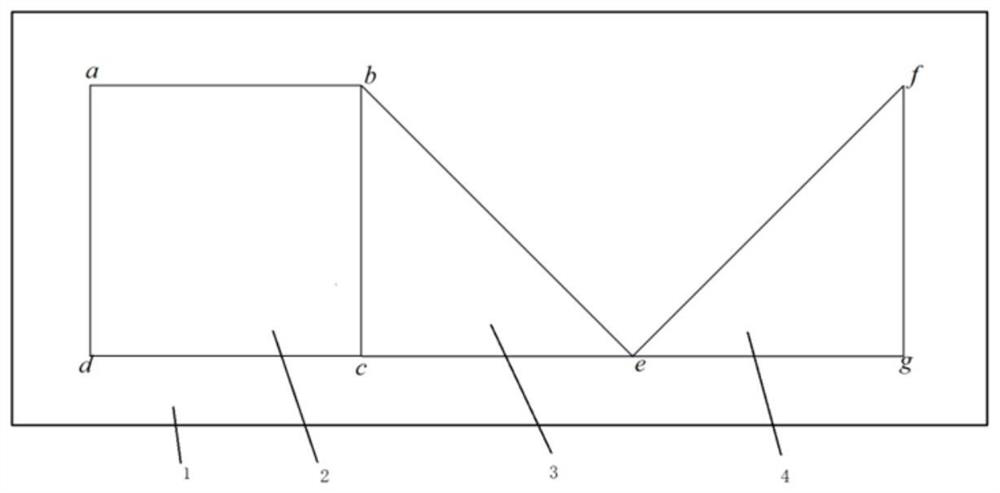
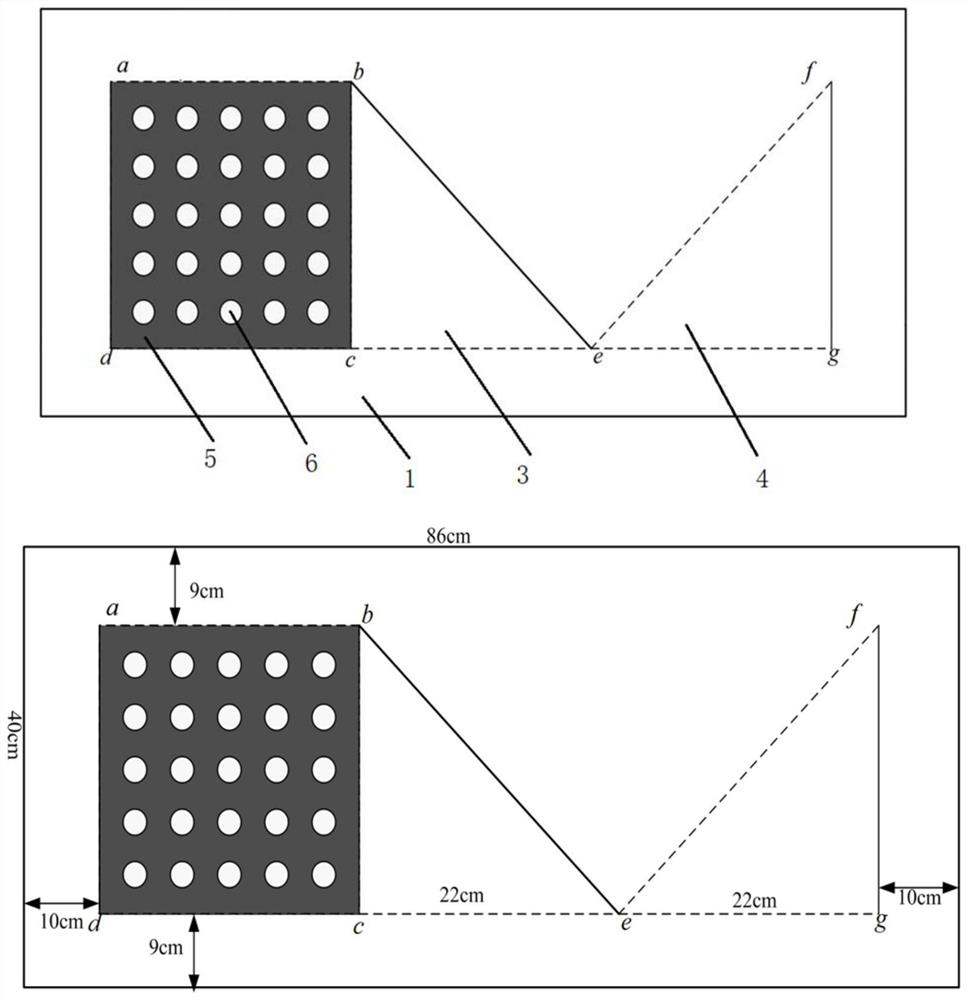
[0046] (1) adjusting the position and height of the calibration plate, the hollow area and a calibration plate with the non-hollow region of the field of view of the camera and the laser radar is placed in;
[0047] (2) a scanning laser radar calibration plate while using the camera to take pictures, a series of a plurality of laser radar scanning point cloud obtained information, the cloud point at the intersection of the boundary line of the hollow and non-hollow area of the scanning lines and the calibration plate as feature points, screening at near point cloud from a number of feature points in the point cloud, the optimization process thereof, by fitting a straight line LM algorithm;
[0048](3) fit equation and the boundary line of the equation by a straight line, the coordinates at the calibration plate coordinate system is calculated;
[0049] (4) find the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More