Unmanned aerial vehicle small target detection method and system and storable medium
A small target detection and target detection technology, applied in the field of computer vision, can solve the problems of insufficient extraction of semantic information, difficulty in filtering sound signals, insufficient performance, etc., to enhance the ability to deal with complex scenes, improve the ability to express features, The effect of improving detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
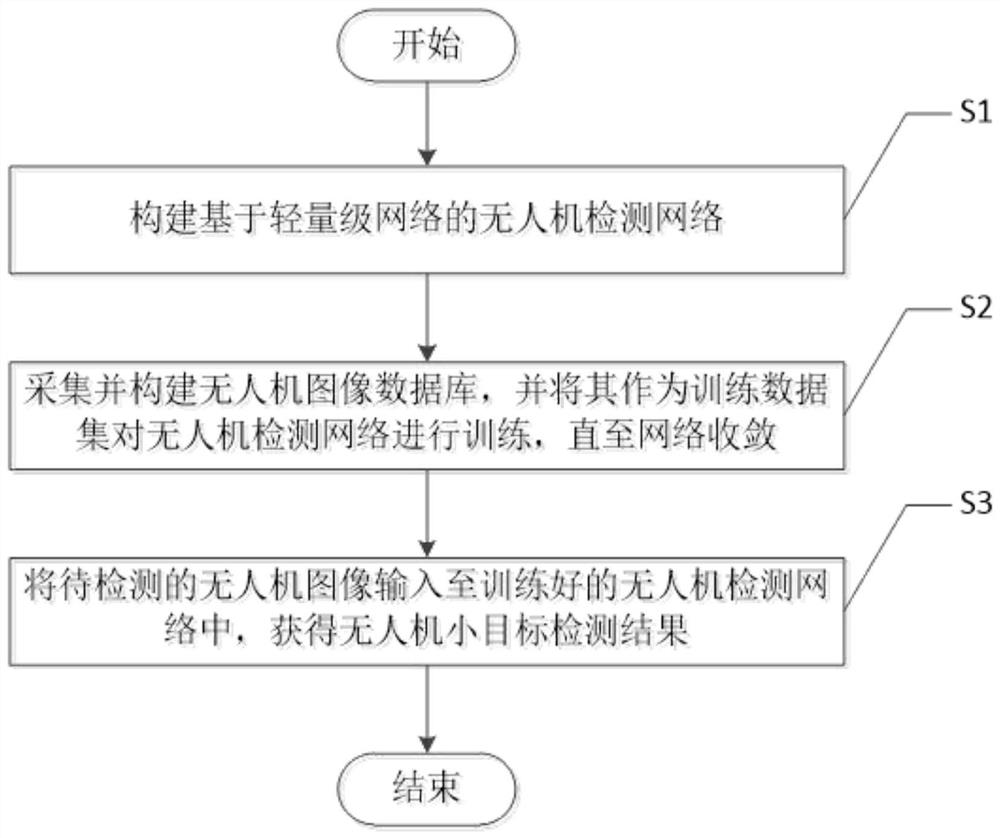
[0068] The embodiment of the present invention discloses a small target detection method for unmanned aerial vehicles based on a lightweight depth model, such as figure 1 shown, including the following steps:
[0069] Build a UAV detection network based on a lightweight deep model;
[0070] Collect UAV images and build a UAV image database to obtain a training data set;
[0071] Input the training data set into the UAV detection network for neural network training until the network converges;
[0072] Input the UAV image to be detected into the trained UAV detection network, and obtain the UAV small target detection result of the UAV image to be detected.
[0073] In this embodiment, for the realization of UAV small target detection, most of the targets to be detected in the autonomously collected UAV data set come from outdoor real scenes, and most UAV targets are more accurate than those in the face data set. The proportion of the data in the image is smaller and more blu...
Embodiment 2
[0124] The embodiment of the present invention provides a UAV small target detection system based on a lightweight depth model, such as Figure 7 shown, including:
[0125] Building blocks for constructing a lightweight deep model-based drone detection network;
[0126] The collection module is used to collect the UAV image and construct the UAV image database to obtain the training data set;
[0127] The training module is used to input the training data set into the unmanned aerial vehicle detection network and carry out neural network training until the network converges;
[0128] The detection module is used to input the image of the unmanned aerial vehicle to be detected into the trained unmanned aerial vehicle detection network, and obtain the detection result of the small target of the unmanned aerial vehicle in the image of the unmanned aerial vehicle to be detected.
[0129] The present invention also provides a computer-storable medium on which a computer program i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More