

Comprehensive positioning error detection device for orthopedic surgery robot
A positioning error and orthopedic surgery technology, which is applied in the field of comprehensive positioning error detection devices for orthopedic surgical robots, can solve the problems of difficulty in direct measurement of errors, and achieves the effects of practical functions, reliable and effective results, and novel ideas.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
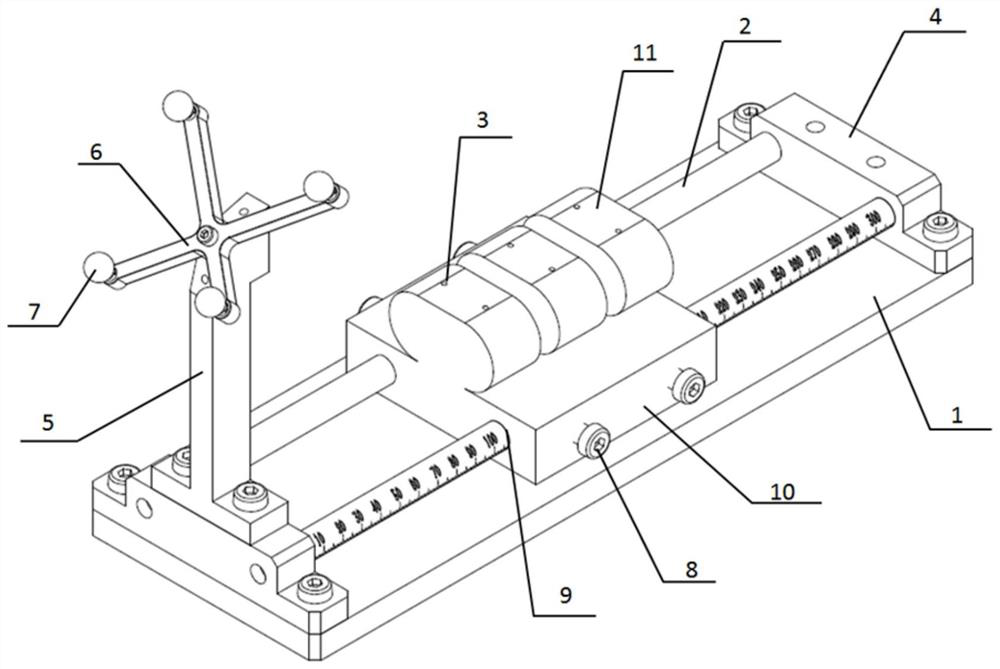
[0072] Embodiment 2: On the basis of the above embodiment 1, the detection channel 3 on the other side of the same drum-shaped cylinder 11 is selected as the test target, the purpose is to target the same lesion body, but change the direction of the surgical path planning of the implant , so that the orthopedic surgical robot manipulator performs different poses, and then detects and judges the comprehensive positioning error of the orthopedic surgical robot manipulator in the same space area, different execution poses, making it closer to the actual clinical use of orthopedic surgical robots.
Embodiment 3
[0073] Embodiment 3: On the basis of the above embodiment 1, adjust the distance between the slider 10 and the tracker by tightening the knob 10, and then re-operate the steps of the above embodiment, the purpose of which is to target a certain large surgical space area Different lesions in the same implant surgical path planning direction, but the orthopedic surgical robot manipulator performs different poses, and then for different lesions of the orthopedic surgical robot manipulator in a large surgical space area, different The comprehensive positioning error of the execution pose is detected and judged, making it closer to the actual clinical use of orthopedic surgery robots.
Embodiment 4
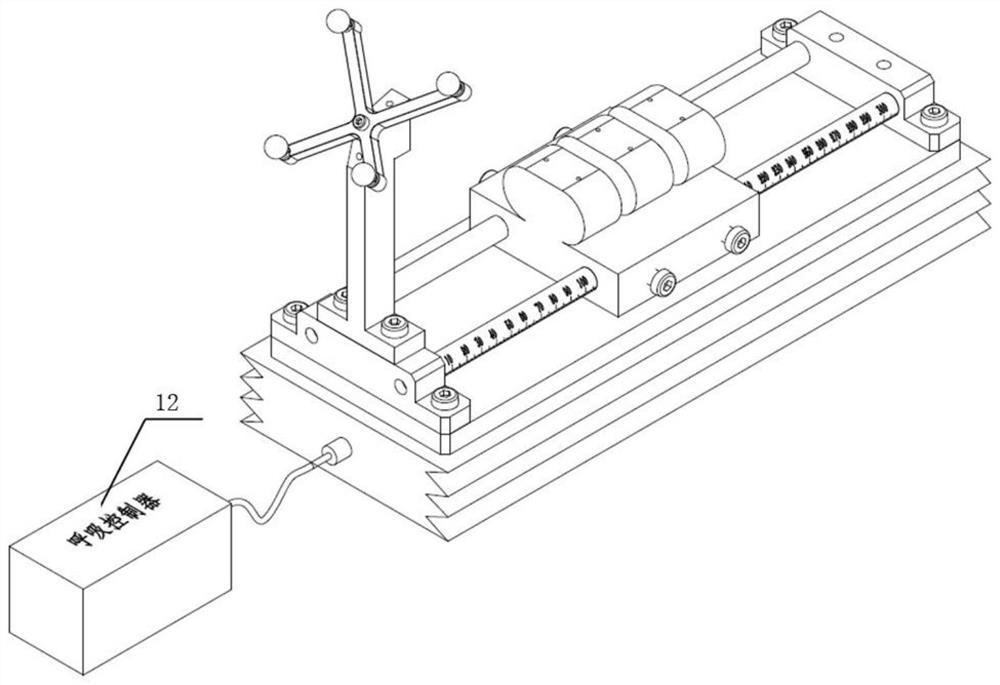
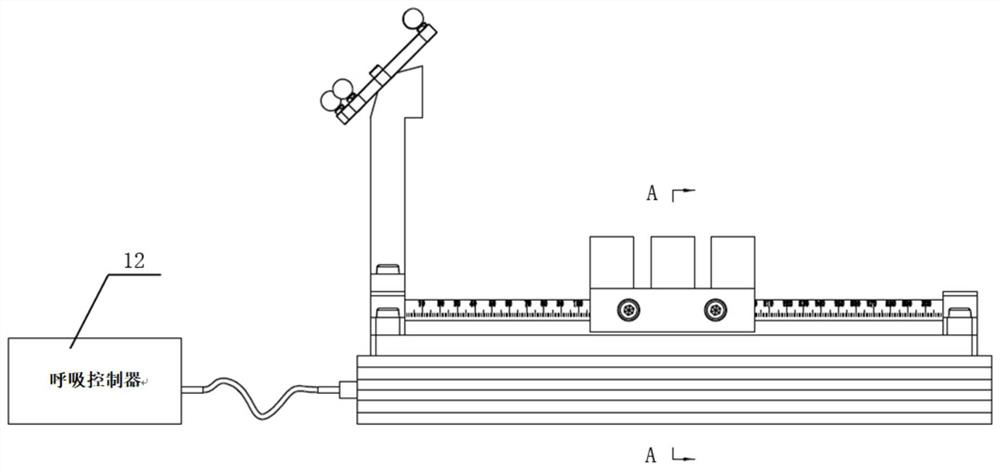
[0074] Embodiment 4: As a further improvement, on the basis of Embodiment 1, a breathing simulation device (component) that can move longitudinally is added under the base 1, the amplitude and frequency of this movement can be adjusted, and then the above-mentioned implementation can be re-operated. The steps of the example, the purpose is to plan the same implant surgical path for the same lesion body, but it is affected by the patient's spontaneous breathing, so that the orthopedic surgical robot manipulator performs different poses, and then the orthopedic surgical robot manipulator in the The same lesion body, the same surgical planning path, and the comprehensive positioning error of different execution poses are detected and judged, making it closer to the actual clinical use of orthopedic surgical robots.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More