

AGV path planning method and device in storage environment
A path planning and environmental technology, which is applied in transportation and packaging, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve problems such as detours and stops, improve accuracy, shorten distance, The effect of improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
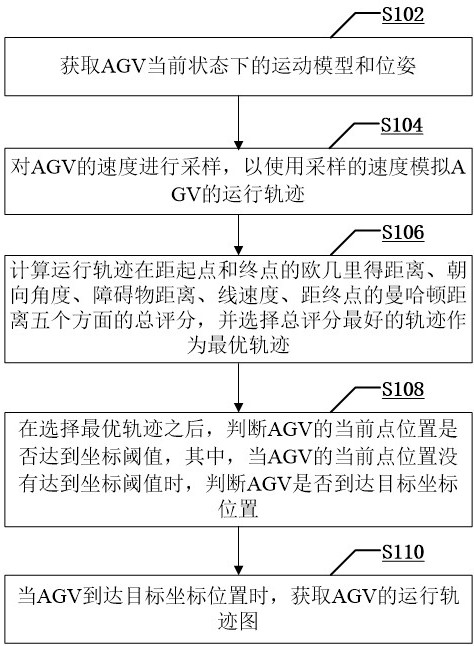
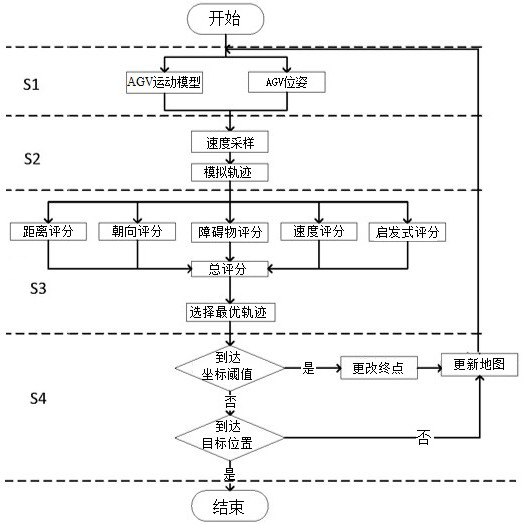
[0101] Please refer to figure 2 , figure 2 It is a schematic flowchart of a path planning method provided in this application, and the path planning method may include:
[0102] S1: Obtain the motion model and current pose of the AGV.
[0103] This step aims to obtain the linear velocity based on the current motion model of the AGV and the pose of the AGV v and the current angular velocity ω and the current position of the AGV ( x , y ) and the current angle θ, used to determine the initial velocity space and position of the next step. This process can be realized based on sensor information collection equipment. This application does not limit the types and models of sensors and information collection equipment, which can be radars, professional cameras, etc. Need to obtain the following information of AGV:
[0104] T ={ x , y , θ , v , ω}
[0105] It mainly includes the horizontal and vertical coordinates and the orientation angle of the position of the AGV...
Embodiment 2
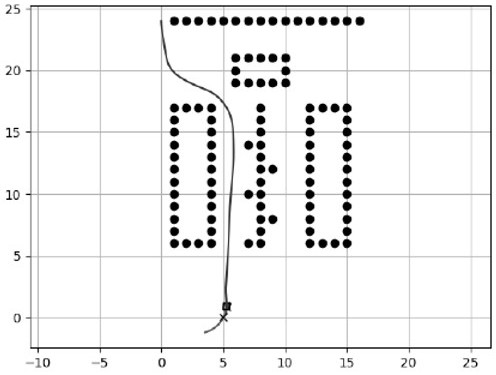
[0149] The path planning method in the storage environment has been described in detail above. The starting point and end point of AGV driving are as follows image 3 As shown, the present application also provides a method for selecting transit points and variable endpoints corresponding to this method.
[0150] Through the relevant steps of Embodiment 1, the movement of the AGV has been guaranteed, but in order to prevent possible difficulties in passing through the pass and detours, and effectively set the coordinate threshold, the determination and arrival at the end point can be divided into two parts: Finding in the global path The transit point enables the AGV to pass through the key pass; after passing the pass, the AGV accurately reaches the end point along the obstacles.
[0151] image 3 In order not to set a transfer point and a variable end point, the AGV may go directly to the end position and go around a long way. In actual operation, the steering time will be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More