

Quadruped robot driven by rotary rolling diaphragm and multi-gait driving method of quadruped robot
A quadruped robot and rolling diaphragm technology, which can be used in motor vehicles, transportation and packaging, etc., can solve the problems of reducing actuator efficiency and mechanical efficiency, and achieve the effects of improving driving efficiency, reducing friction loss, and making folding easier
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
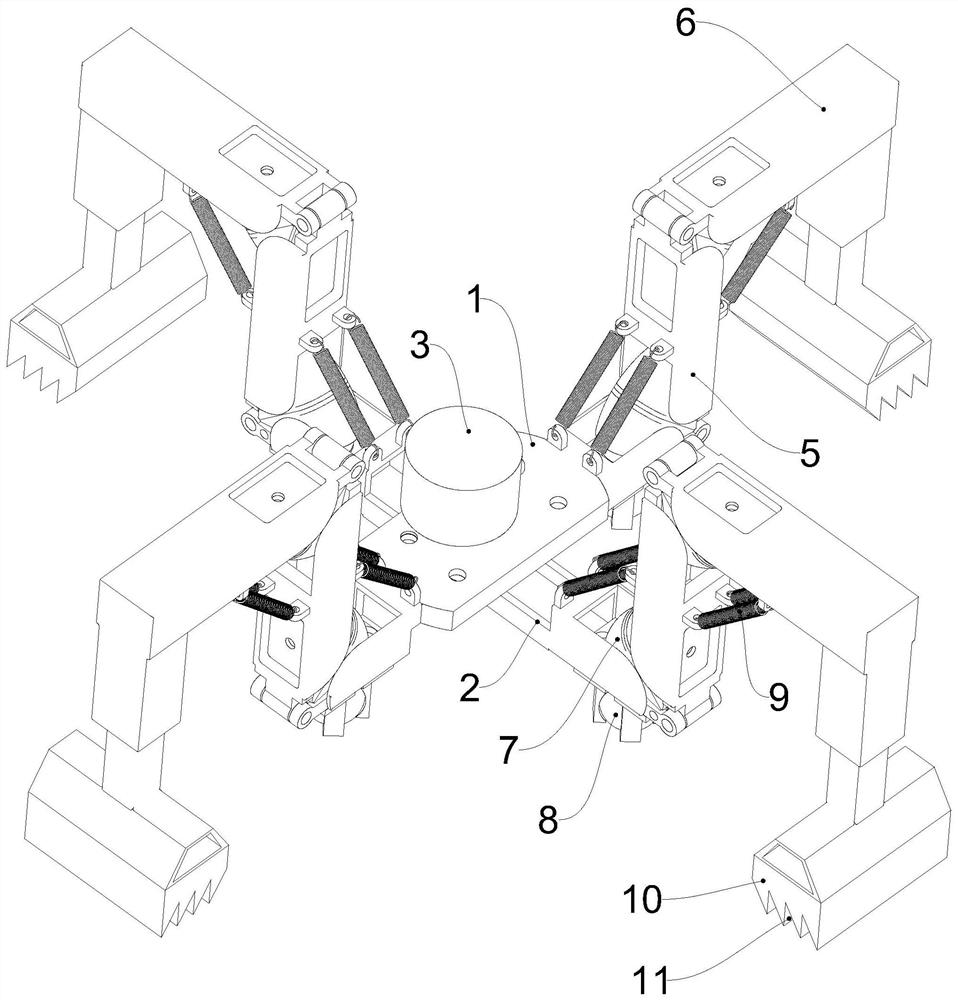
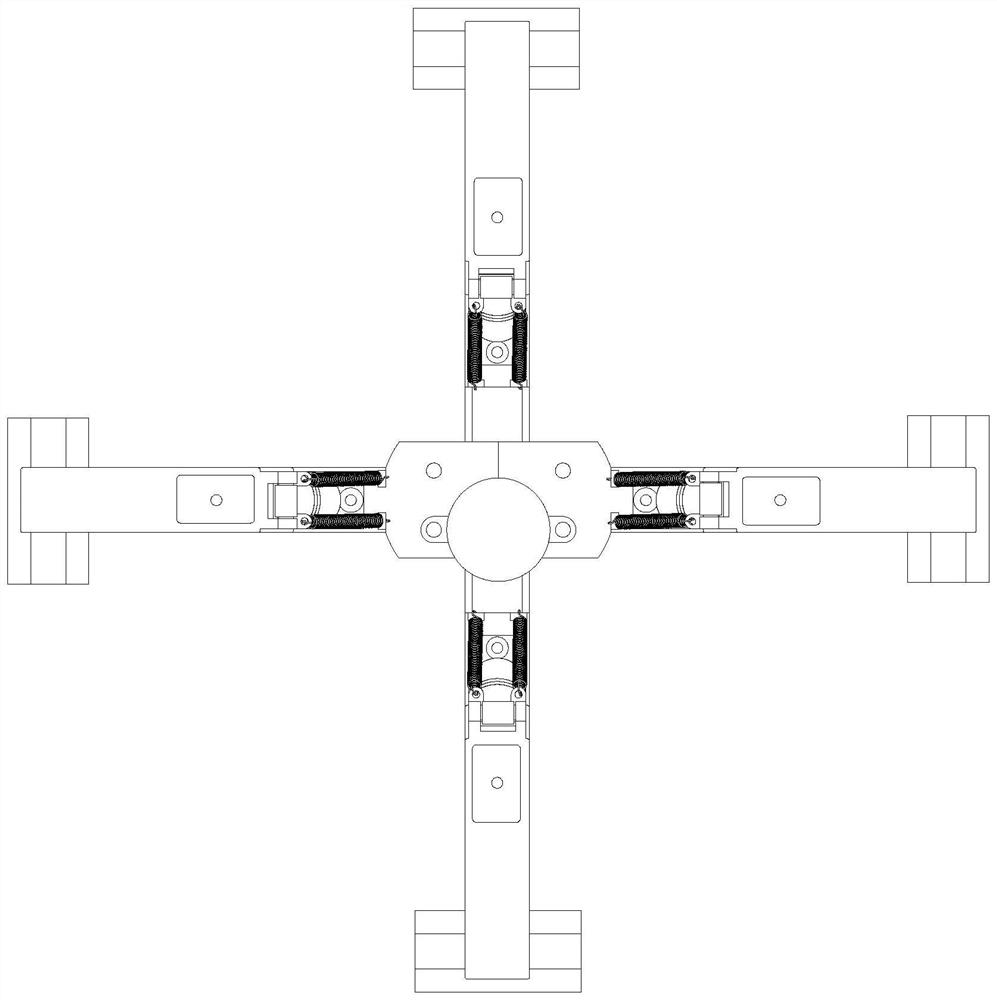
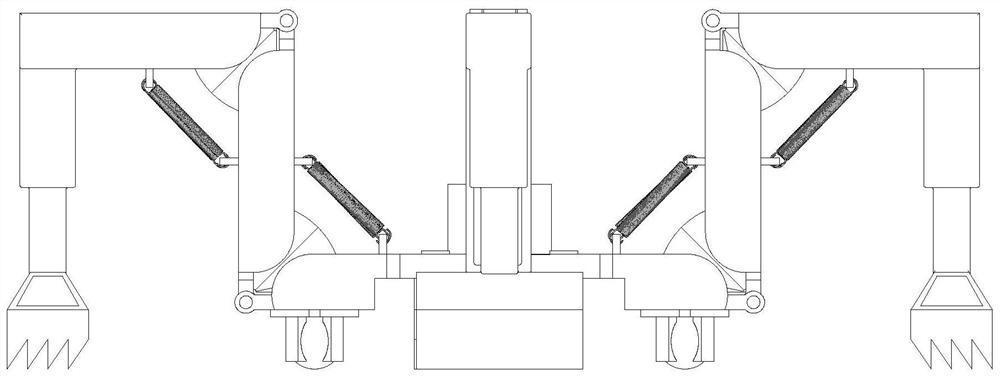
[0049] Such as figure 1 , 2 As shown in and 3, a quadruped robot driven by a rotating and rolling diaphragm includes a first chassis 1, a second chassis 2, a motor 3, a ball 8 and a driving foot assembly. Both the first chassis 1 and the second chassis 2 are elongated. The middle part of the first chassis 1 is rotatably connected with the middle part of the second chassis 2 . The second chassis 2 is located below the first chassis 1 . The middle part of the first chassis 1 is fixed to the casing of the motor 3 ; the main shaft of the motor 3 is fixedly connected to the second chassis 2 through a flange coupling 4 . Both ends of the bottom of the first chassis 1 and the second chassis 2 are equipped with balls 8 . The bottoms of the four balls 8 are flush.
[0050] The four driving foot assemblies are installed on the two ends of the first chassis 1 and the second chassis 2 respectively. The driving foot assembly includes a first bionic leg 5, a second bionic leg 6, a rot...
Embodiment 2
[0079] Such as Figure 7 As shown, a quadruped robot driven by a rotating and rolling membrane. The difference between this embodiment and Embodiment 1 is: between the inner side of the first bionic leg 5 and the first chassis 1, and between the first bionic leg 5 and the second No tension spring 9 is passed between the inner sides of the bionic legs 6 . The rotary rolling diaphragm driver 7 performs contraction reset through pressure control, specifically as follows:
[0080] The outer end surface of the second housing 7-2 of the rotary rolling diaphragm driver 7 is fixed with a sealing plate 7-8; the middle part of the sealing plate 7-8 is provided with a through hole 7-9; the arc connecting part 7-5 passes through the A hole 7-9; a sealing ring 7-10 is arranged between the through hole 7-9 and the arc-shaped connection part 7-5;
[0081] The piston body 7-4 divides the fan-shaped chamber in the casing into a first pressure chamber and a second pressure chamber; the first ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More