

Robot-assisted trocar automatic butt joint method and device
A robot-assisted and automatic docking technology, applied in trocars, surgical robots, computer-aided surgery, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
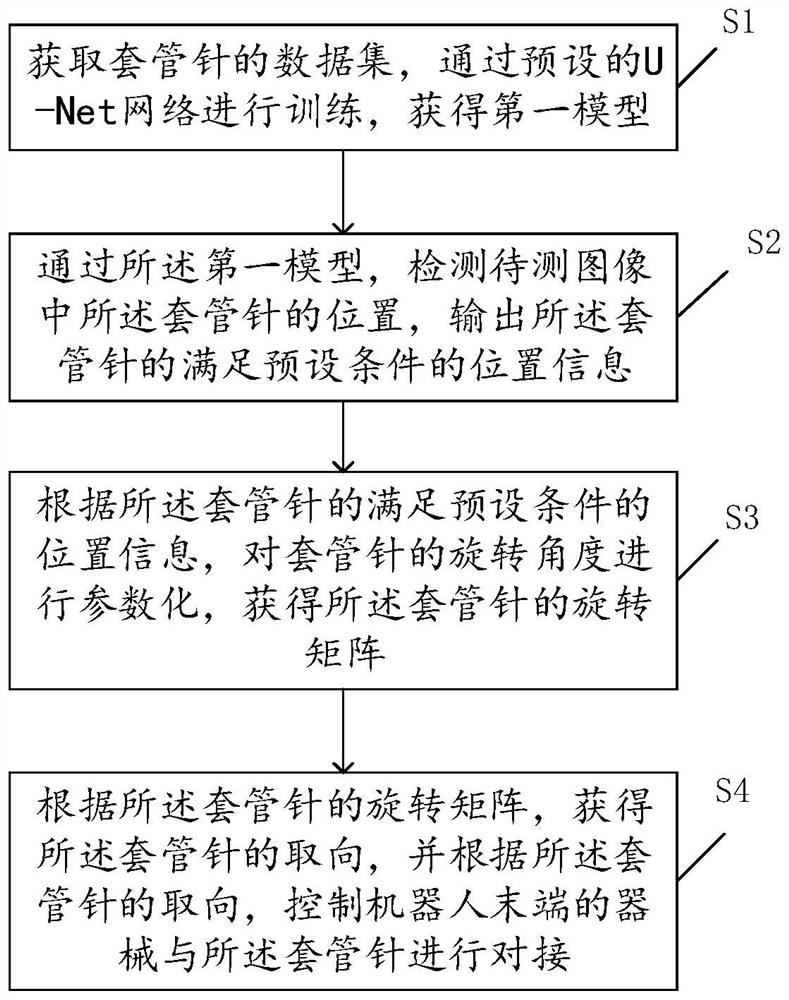
[0048] Please refer to figure 1 , figure 1 A robot-assisted trocar automatic docking method provided for an embodiment of the present invention includes steps S1 to S4; wherein, this embodiment uses a five-degree-of-freedom series-parallel ophthalmic surgery robot and a multifunctional welding magnifying glass camera. The series-parallel ophthalmic surgical robot consists of a first joint for two-axis translation and rotation, a second joint, and a slide rail joint for Z-axis movement of the end effector. The first joint is provided with a first linear motor and a As for the second linear motor, the third linear motor and the fourth linear motor are arranged on the second joint, and the fifth linear motor is arranged on the end slide rail joint. The multifunctional welding magnifying glass camera is rigidly mounted to the syringe at the end of the robot in a preset direction by a 3D printed bracket.
[0049] In step S1, the data set of the trocar is obtained, and the preset ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More