

Identification method for kinetic parameters of robot
A technology of dynamic parameters and identification methods, applied in neural learning methods, instruments, complex mathematical operations, etc., can solve the problem that parameter identification is susceptible to noise interference, etc., to overcome the susceptibility to noise, improve integrity, and improve practicability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention is further described in connection with the examples and the drawings, but the embodiments of the present invention are not limited thereto.
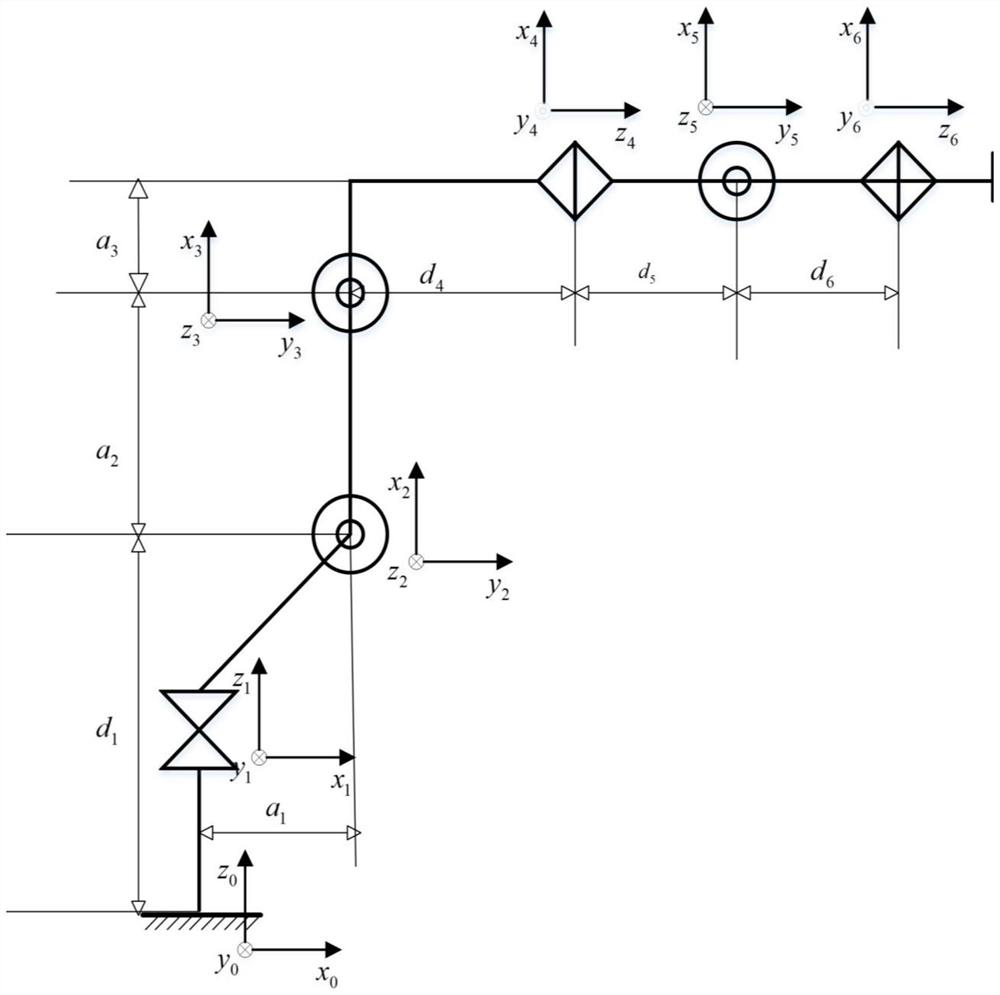
[0076] This example uses six-axis series-type robot as an example object, such as figure 1 Indicated.
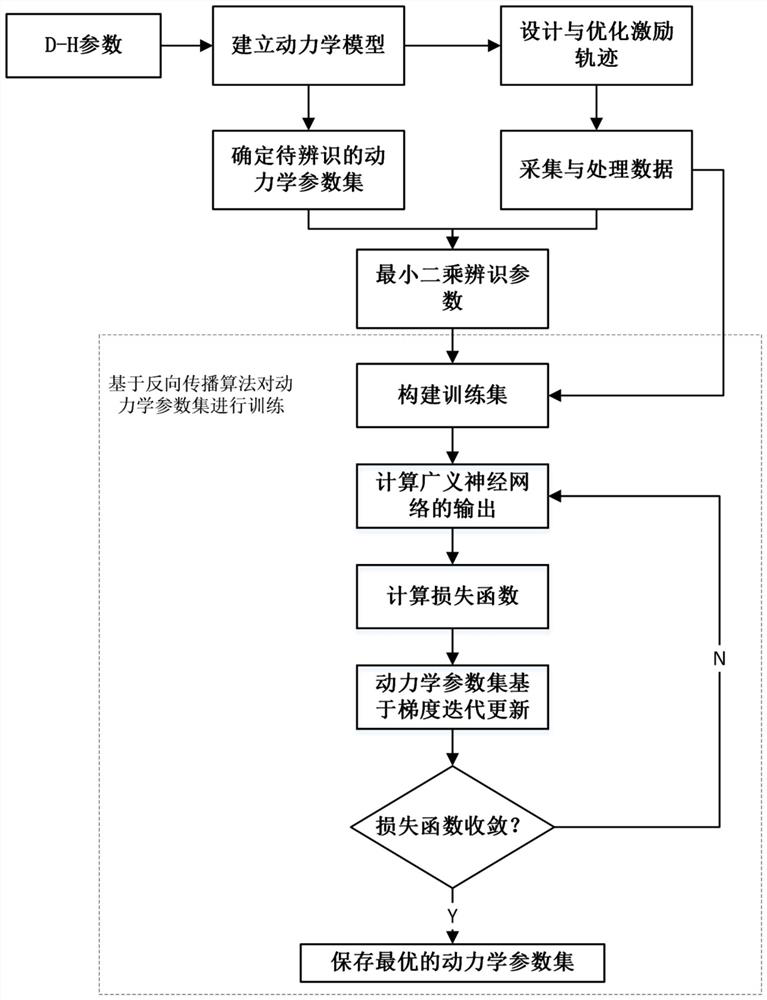
[0077] Such as figure 2 As shown, a method of identifying a robot kinetic parameter provided by this example, comprising the steps:
[0078] S1, collecting multi-group robots to perform joint motion data at the time of excitation trajectory, at each time sampling point, collect joint angle, joint speed, joint torque data, and calculate joint acceleration using second-order center differential method, and filter the filter The joint motion data combination is a training set; specifically, the excitation trajectory described in step S1 is a periodic Fourier fraction.
[0079]
[0080] i represents the robot joint, i represents the robot joint, T represents discrete time sequence, L = 1, 2, ..., N H Indicates t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More