Collaborative robot joint and collaborative robot
A technology of robot joints and encoders, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the single-turn absolute encoder structure, the difficulty of lightweight design, the self-heavyness of collaborative robot joints, cost and production impact, etc. problems, to achieve the effect of excellent waterproof and dustproof performance, compact structure, and improved yield rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
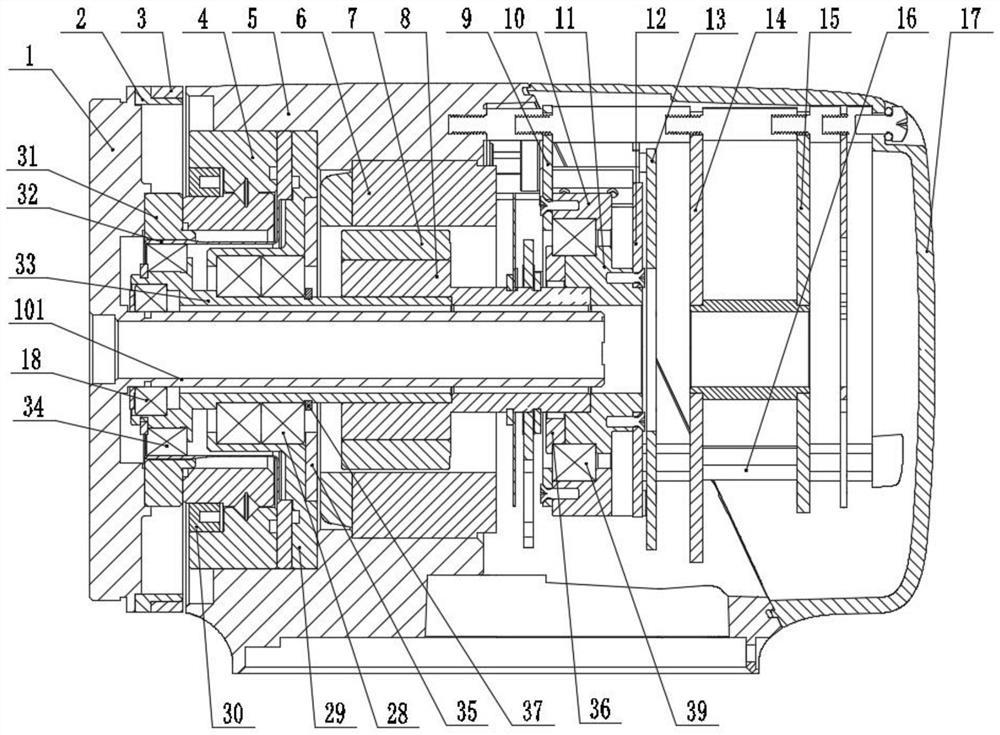
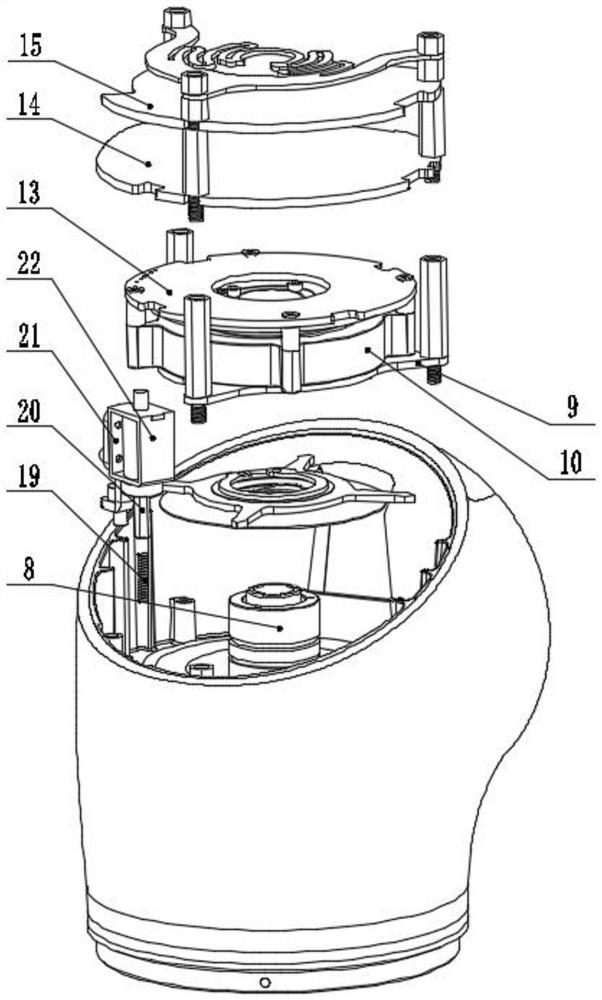
[0038] see Figure 1-2 , a collaborative robot joint, comprising a harmonic reducer front cover 1, an accommodation space formed by a housing 5 and a rear cover 17, and a harmonic reducer assembly located in the accommodation space, a crossed roller bearing 4, and a motor assembly , brake components, encoder components, drive components.
[0039] see figure 1 The motor assembly includes a frameless torque motor and a rotor shaft 8 installed coaxially. The frameless torque motor includes a stator 6 and a rotor 7 . The rotor 7 is fixedly mounted on the rotor shaft 8 , and the stator 6 is fixedly mounted on the housing 5 .
[0040] see figure 1, the harmonic reducer assembly includes a harmonic reducer rear end cover 29 installed coaxially, a harmonic reducer input shaft 33, a double-covered deep groove ball bearing assembly 28, a harmonic reducer and the first deep groove ball bearing 18. One end of the input shaft 33 of the harmonic reducer is fixedly installed on the rotor...
Embodiment approach
[0046] For an implementation, see Figure 7 , the encoder rotor flange 11 is provided with a first positioning step 111 , and the encoder rotor 12 is installed on the first positioning step 111 of the encoder rotor flange 11 . Specifically, a plurality of screws parallel to the axis fixes the encoder rotor 12 on the first positioning step 111 of the encoder rotor flange 11, that is, the screws are installed axially, and of course, non-axial installation; and can also be installed in combination with reference to the above-mentioned interference fit.
[0047] see Figure 8 , Figure 8 Another structure of the encoder assembly is shown, the encoder rotor 12 is connected with a mounting positioning ring 43 , and the mounting positioning ring 43 is connected with the encoder rotor flange 11 by interference fit or screw connection. The installation and positioning ring 43 is a hollow ring, which is used to accommodate the parts of the encoder disk 12, such as protruding integrat...
Embodiment 2
[0058] A collaborative robot, which includes the joint of the collaborative robot as described in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com