

Laser ray spacing measurement method for robot self-calibration
A measurement method and self-calibration technology, applied in the field of robot calibration, can solve the problems of low efficiency and achieve high efficiency and wide application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in further detail below in conjunction with the accompanying drawings.
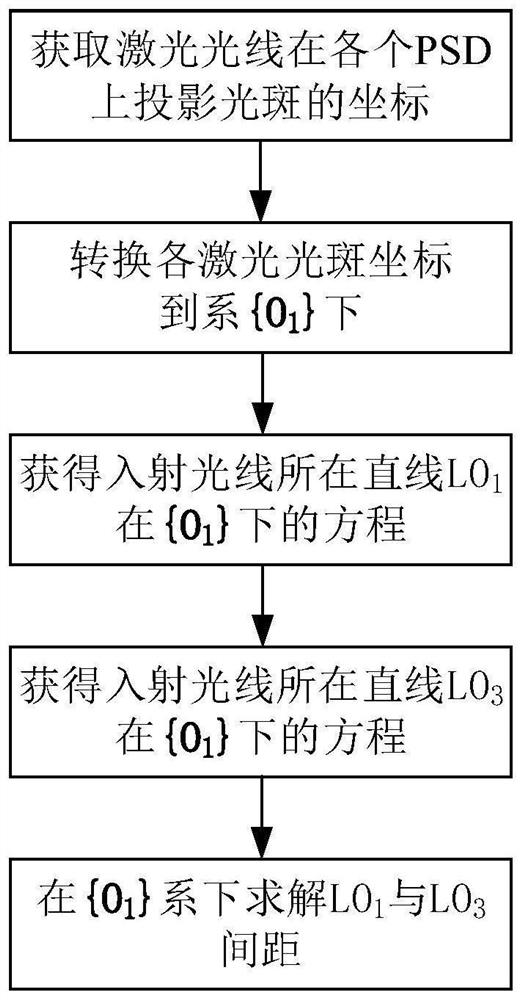
[0050] Laser beam distance measurement method for robot self-calibration, such as figure 1 shown, including the following steps:
[0051] Step 1. Obtain the coordinates of the laser light spot projected on each PSD
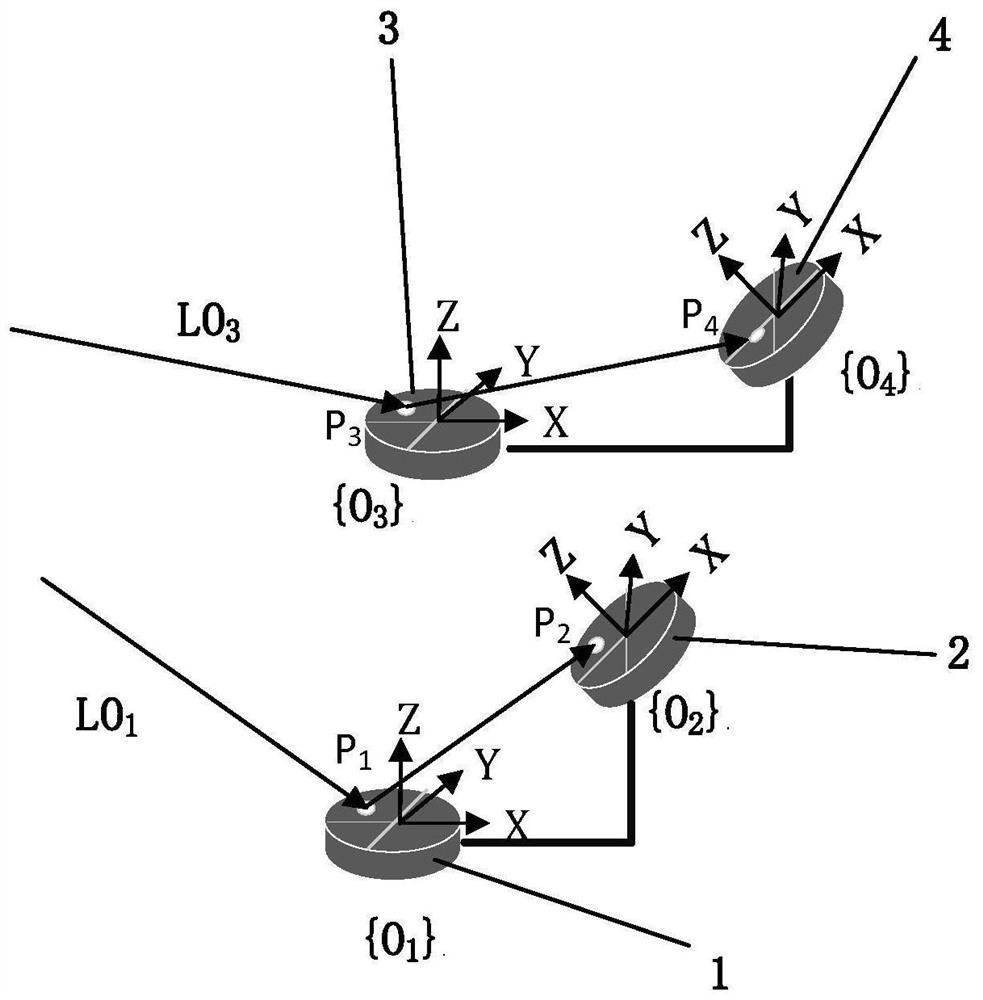
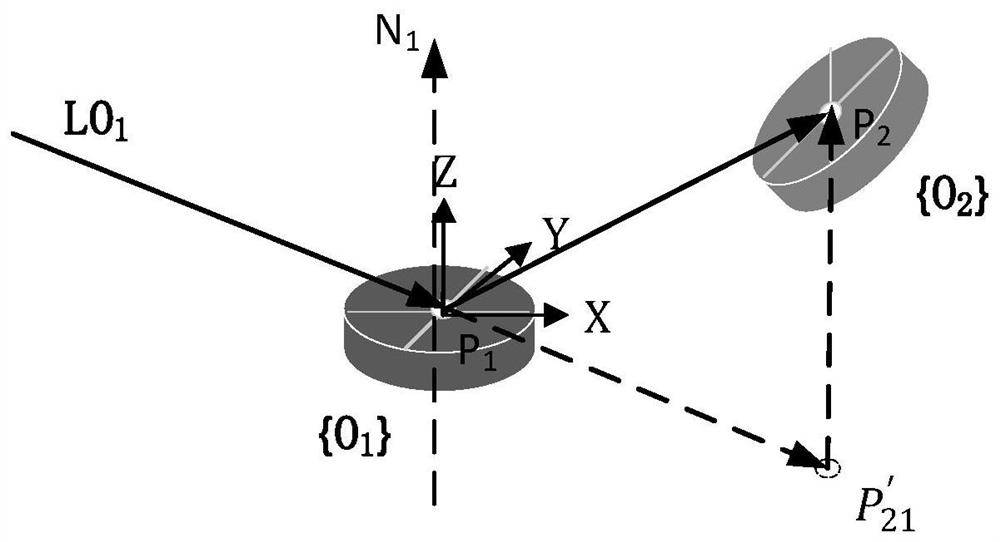
[0052] Such as figure 2 As shown, let the PSD 1 1 The coordinate system is {O 1}, PSD 2 2 The coordinate system is {O 2}, PSD 3 3 coordinate system is {O 3}, PSD 4 4 The coordinate system is {O 4}, {O 1}, {O 2}, {O 3}, {O 4} rigidly fixed together. Department {O 2} relative to the system {O 1}’s pose transformation matrix is Department {O 3} relative to the system {O 1}’s pose transformation matrix is Department {O 4} relative to the system {O 1}’s pose transformation matrix is is known; make the laser light LO 1 via PSD 1 1 center area reflection to PSD 2 2 central area, at this time incident to the system {O 1} Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More