Robot joint embedded electromagnetic braking harmonic speed reduction device and joint system
A technology of robot joints and electromagnetic braking, which is applied to the transmission device, transmission device parts, brake type, etc., can solve the problems of the robot's inability to work, affect the robot's effective load capacity, and troublesome robot operation and control, and achieve the moment of inertia Xiao Xiao, compact structure, and the effect of improving positioning accuracy and performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
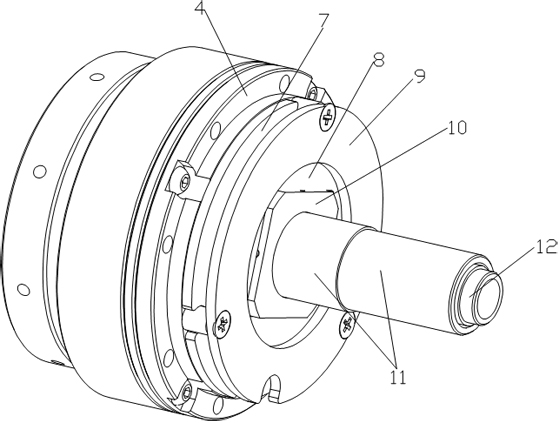
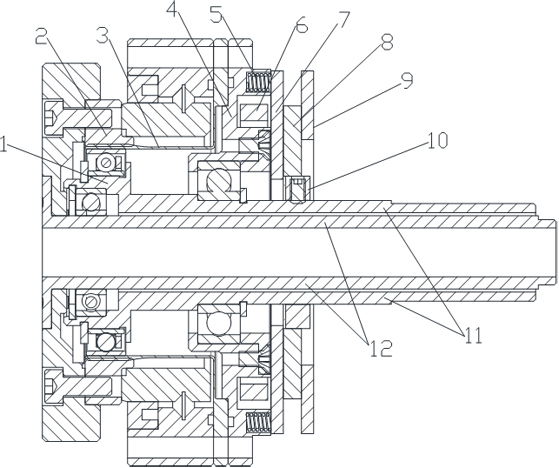
[0029] The electromagnetic braking harmonic deceleration device embedded in the robot joint and the joint system of the present invention mainly aim at the following technical shortcomings of the prior art: 1. Each component inside the robot joint is installed in the joint as an independent individual, and the degree of integration and light weight is low. The volume and mass are large, and the moment of inertia is large during high-speed operation, which affects the flexibility and working ability of the robot; 2. More parts lead to complex structures, resulting in difficulties in design and selection, cumbersome assembly processes, and the matching effect of parts from different manufacturers. 3. In order to achieve deceleration and drive in the traditional way, the two heat sources of the harmonic reducer and the driving motor are placed next to each other, and the high temperature condition affects the normal operation of the harmonic reducer, resulting in performance degrad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More