Mechanical arm
A technology of manipulators and components, applied in the field of manipulators, can solve problems such as inability to grasp and release workpieces well, low work efficiency, and structural design that cannot independently or synchronously complete longitudinal movement, lateral movement and vertical movement, etc., to achieve Improve rigidity, save time for workpiece replacement, and reduce weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings. It should be noted here that the descriptions of these embodiments are used to help understand the present invention, but are not intended to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below may be combined with each other as long as they do not constitute a conflict with each other.
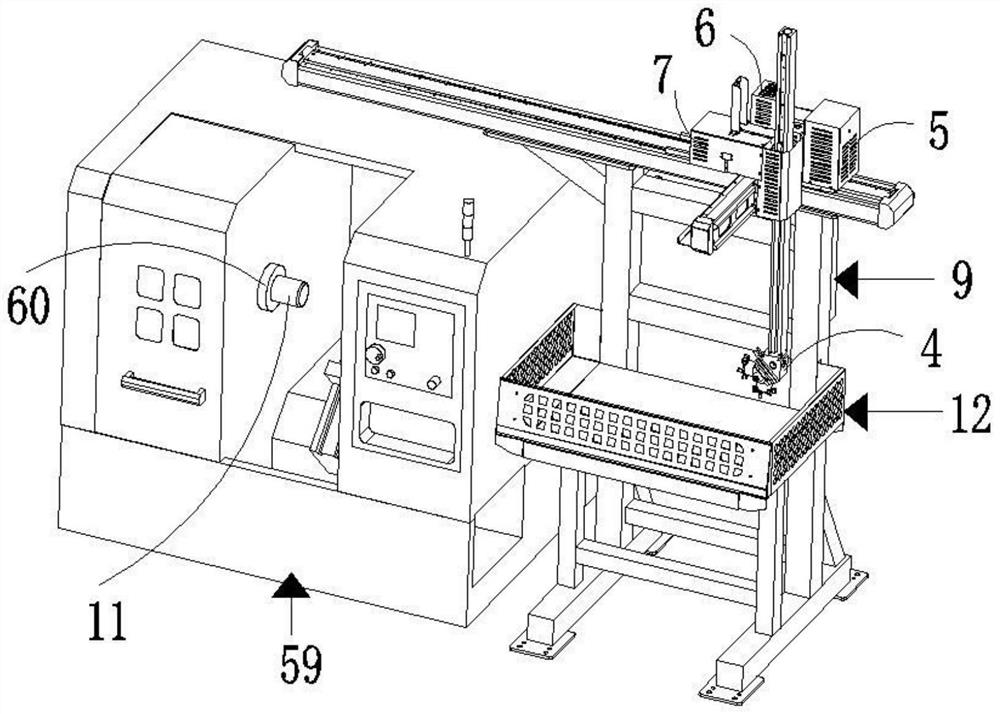
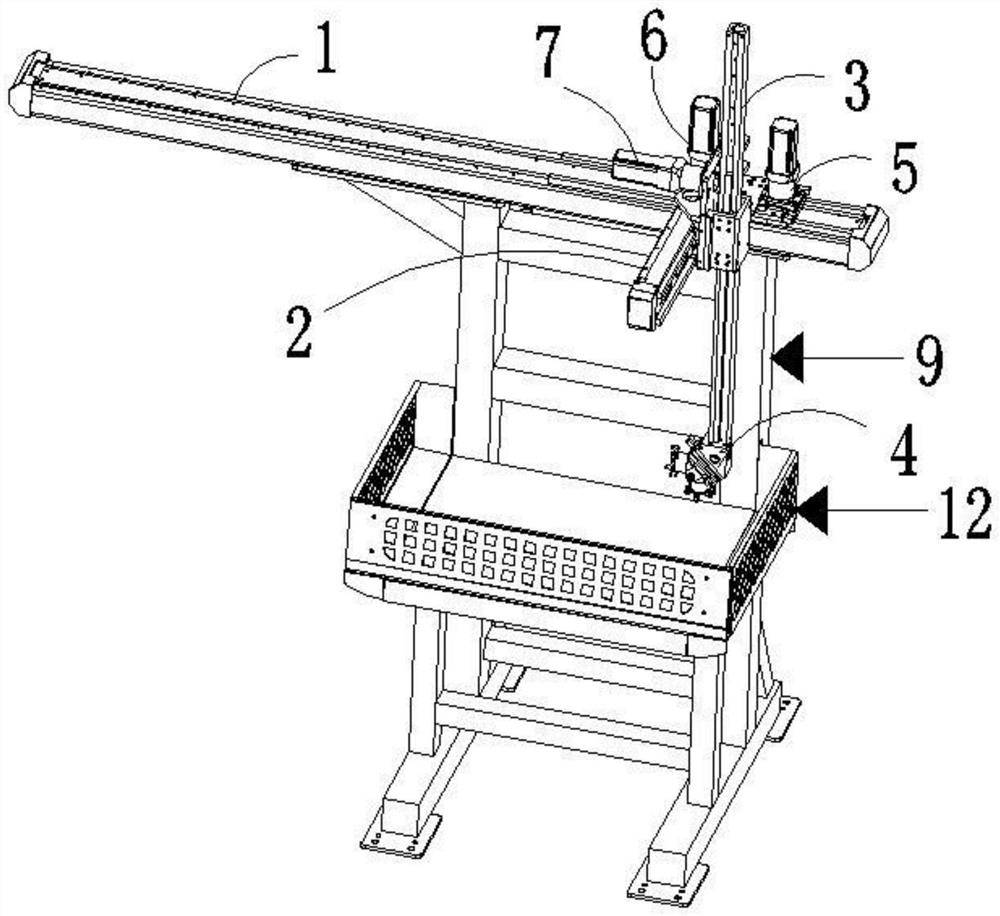
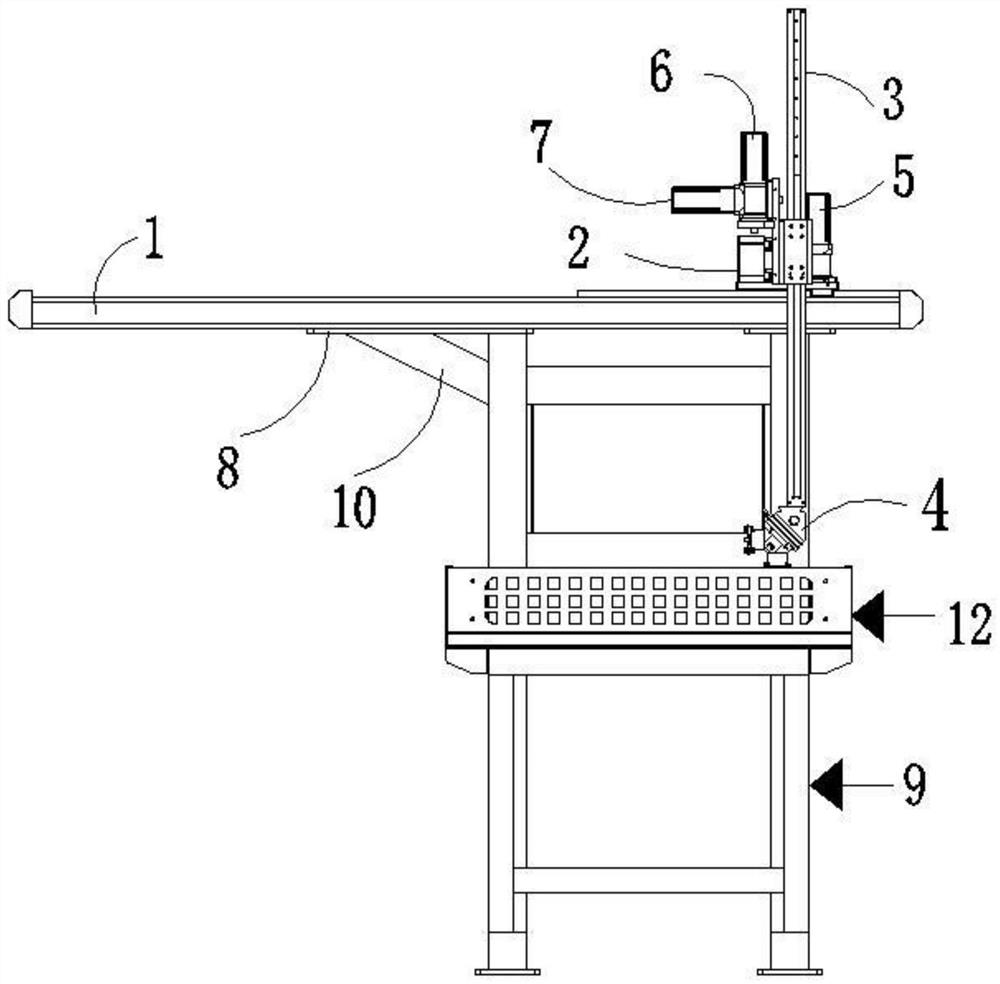
[0027]Manipulators are also called robots, automatic operating devices, automatic operating machinery, etc., which can imitate certain actions and functions of human hands and arms. station; the fixture device can grab and release the workpiece; after one of the pneumatic gripper devices grabs the processed workpiece, the other pneumatic gripper device can be aligned with the processing station through the rotation of the rotary cylinder, and The workpiece to be process...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap