

Motion track determination method, device and system
A technology of motion trajectory and determination method, which is applied in the direction of measuring devices, measuring distances, instruments, etc., can solve the problems of threatening the life safety of firefighters, negative impact, and being unable to record their surrounding environment, and achieve the goal of improving accuracy and stability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0030] figure 1 It is a flowchart of a method for determining a motion trajectory provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of determining the motion trajectory of a target object indoors. This method can be implemented by the device for determining the motion trajectory provided by the embodiment of the present invention. Execution, the device may be implemented by software and / or hardware. see figure 1 , the method for determining the motion trajectory provided by this embodiment includes:
[0031] S110. Acquire inertial information and step distance measurement information of the target object's feet.
[0032] Among them, the target object is the object that needs to obtain positioning information; the inertial information and step distance measurement information of the target object's feet can be obtained through different sensors set on the target object's feet, such as firefighters' fire protection boots , for e...
Embodiment 2
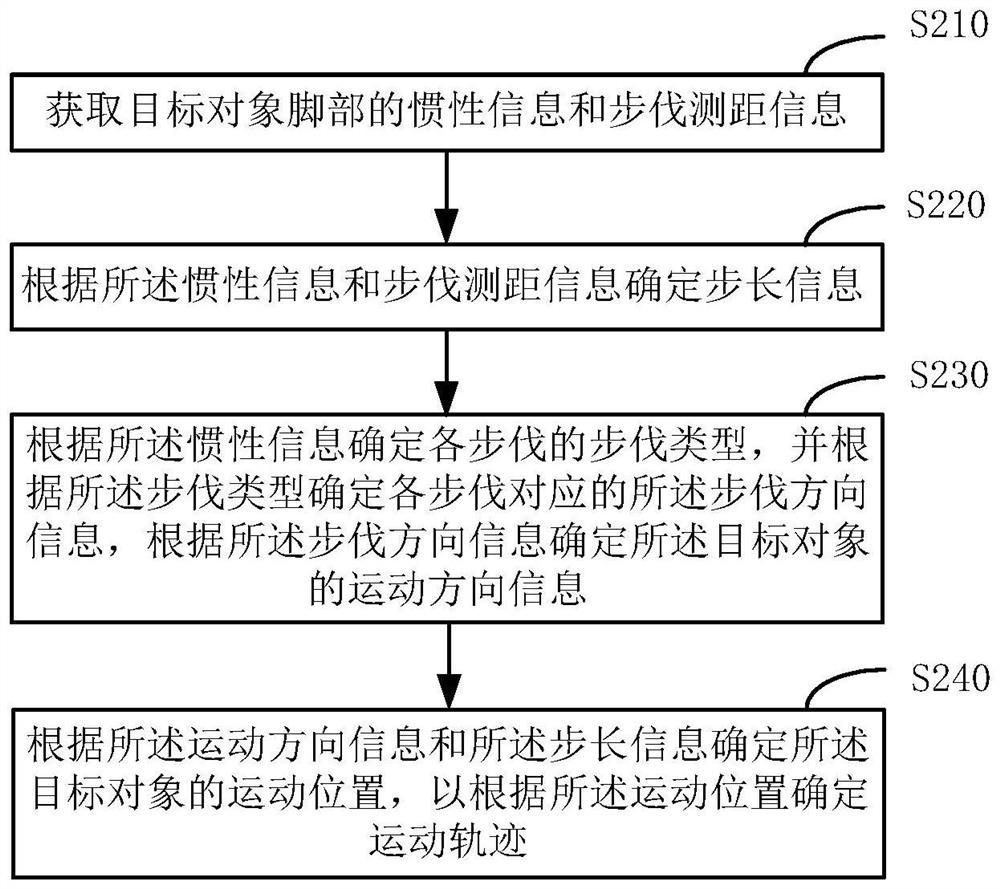
[0056] figure 2 It is a flow chart of a method for determining a motion trajectory provided by Embodiment 2 of the present invention. This technical solution is a supplementary explanation for the process of determining step direction information based on the inertial information. Compared with the above scheme, the specific optimization of this scheme is to determine the step direction information according to the inertial information, including:
[0057] The step type of each step is determined according to the inertial information, and the step direction information corresponding to each step is determined according to the step type. Specifically, the flow chart of the method for determining the motion trajectory is as follows: figure 2 Shown:
[0058] S210. Acquire inertial information and step distance measurement information of the target object's feet.
[0059] S220. Determine step size information according to the inertial information and step ranging information....
Embodiment 3
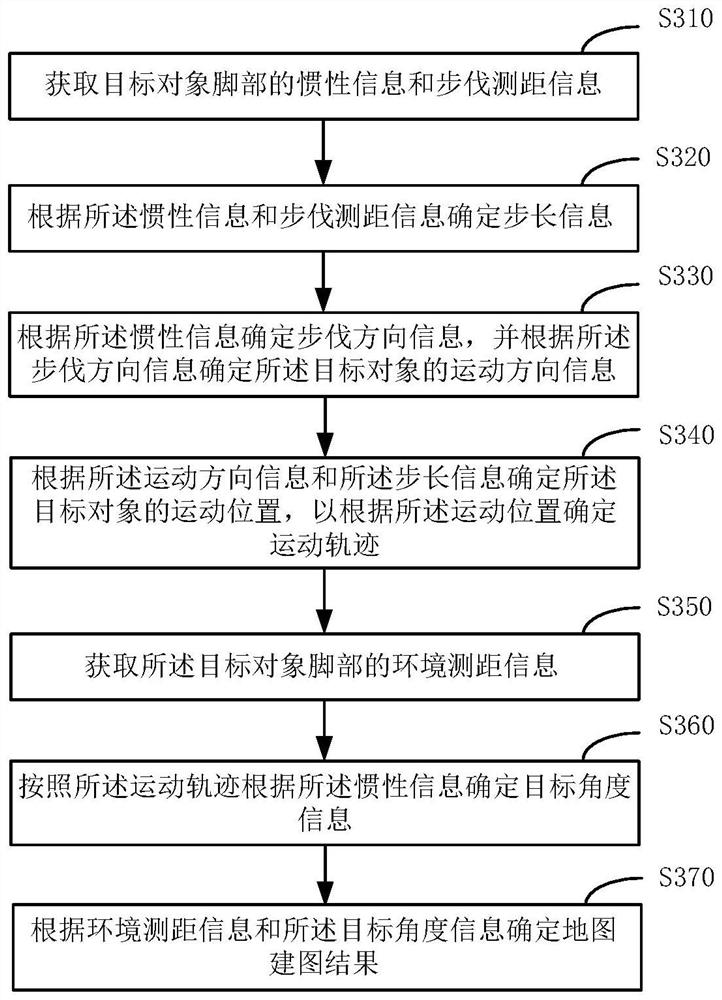
[0078] image 3 It is a flow chart of a method for determining a motion trajectory provided by Embodiment 3 of the present invention, and this technical solution is a supplementary explanation for the mapping process. Compared with the above scheme, the specific optimization of this scheme also includes:
[0079] Acquiring environmental ranging information of the target object's feet;
[0080] determining target angle information according to the motion trajectory according to the inertial information;
[0081] A map construction result is determined according to the environmental ranging information and the target angle information. The flow chart of the specific motion trajectory determination method is as follows: image 3 Shown:
[0082] S310. Acquire inertial information and step distance measurement information of the target object's feet.
[0083] S320. Determine step length information according to the inertial information and step ranging information.
[0084] S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More