

Bridge crane model prediction control method based on data driving
A technology of model predictive control and bridge cranes, applied in the direction of adaptive control, general control system, control/regulation system, etc., to achieve the effect of fast and accurate positioning, high application value, and anti-swing control goals
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described below in conjunction with the accompanying drawings, but the present invention is not limited in any way. Any transformation or replacement based on the teaching of the present invention belongs to the protection scope of the present invention.
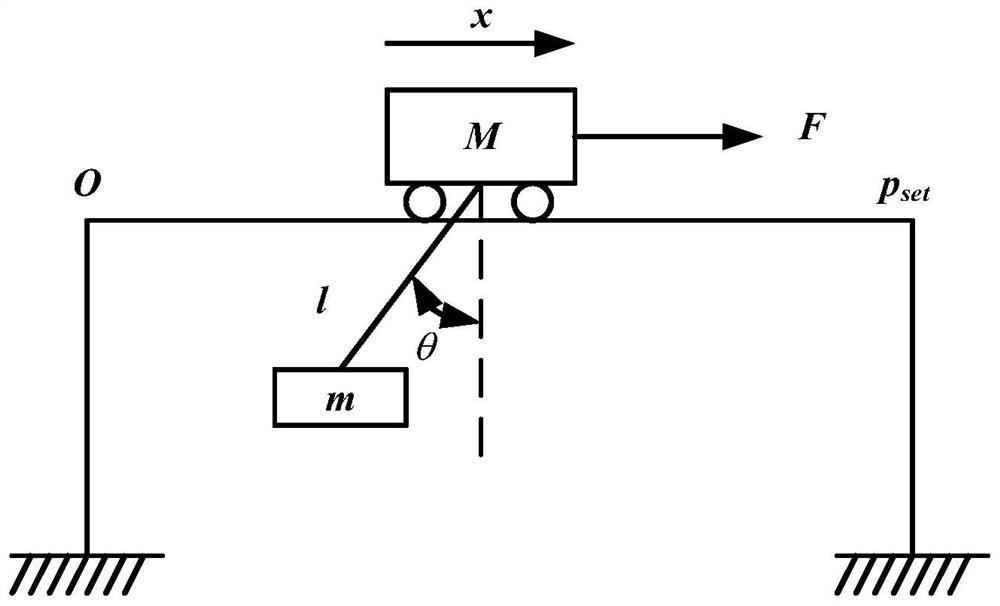
[0057] The overall structure of the bridge crane includes two parts: trolley operating mechanism and lifting mechanism. The trolley running mechanism can be divided into two parts: a large trolley and a small trolley. The trajectories of the small car and the big car are perpendicular to each other. The trolley is responsible for translating the entire overhead crane along the elevated rails on both sides of the production line. It is responsible for the translation on the bridge, and the load lifting mechanism is responsible for completing the lifting movement of the load. According to the crane industry specification, a complete crane operation process generally includes the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More