

Target identification method, system and device based on multivariate information fusion and medium
A target recognition and multi-information technology, applied in the field of target recognition, can solve problems such as large noise, fusion, and inaccurate target tracking and monitoring, and achieve the effect of expanding the detection range and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
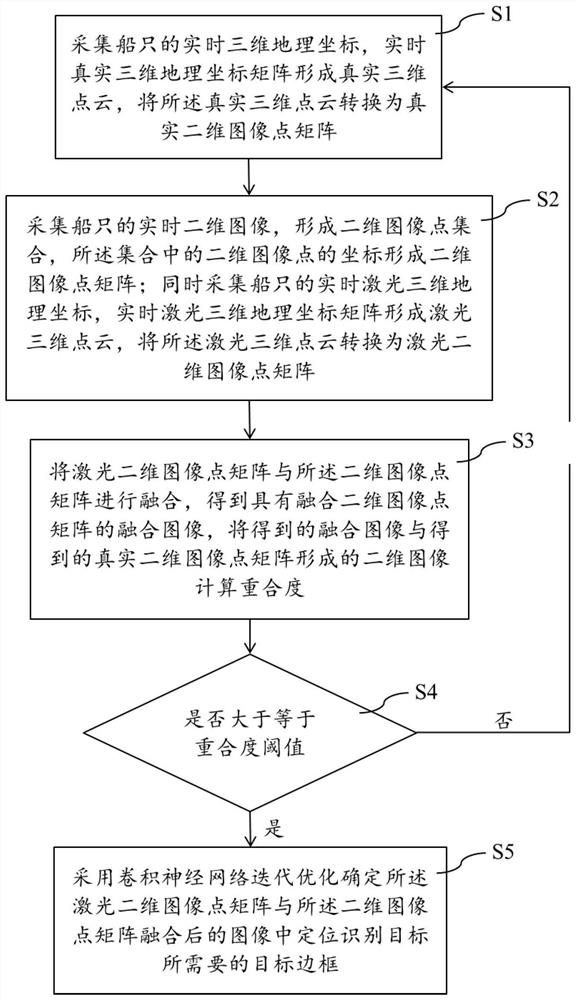
[0058] like figure 1 As shown, the target recognition method based on multivariate information fusion provided in this embodiment includes the following steps;
[0059] S1: Collect the real-time three-dimensional geographic coordinates of the ship, and form the real-time three-dimensional geographic coordinate matrix to form a real three-dimensional point cloud; convert the real three-dimensional point cloud into a real two-dimensional image point matrix;
[0060] S2: Collect the real-time two-dimensional image of the ship to form a two-dimensional image point set, and the coordinates of the two-dimensional image points in the set form a two-dimensional image point matrix; simultaneously collect the real-time laser three-dimensional geographic coordinates of the ship, and form a real-time laser three-dimensional geographic coordinate matrix Laser 3D point cloud; convert laser 3D point cloud into laser 2D image point matrix;
[0061] S3: Fusing the laser two-dimensional image ...
Embodiment 2
[0065] like figure 1 As shown, the target recognition method based on multivariate information fusion provided in this embodiment includes the following steps;
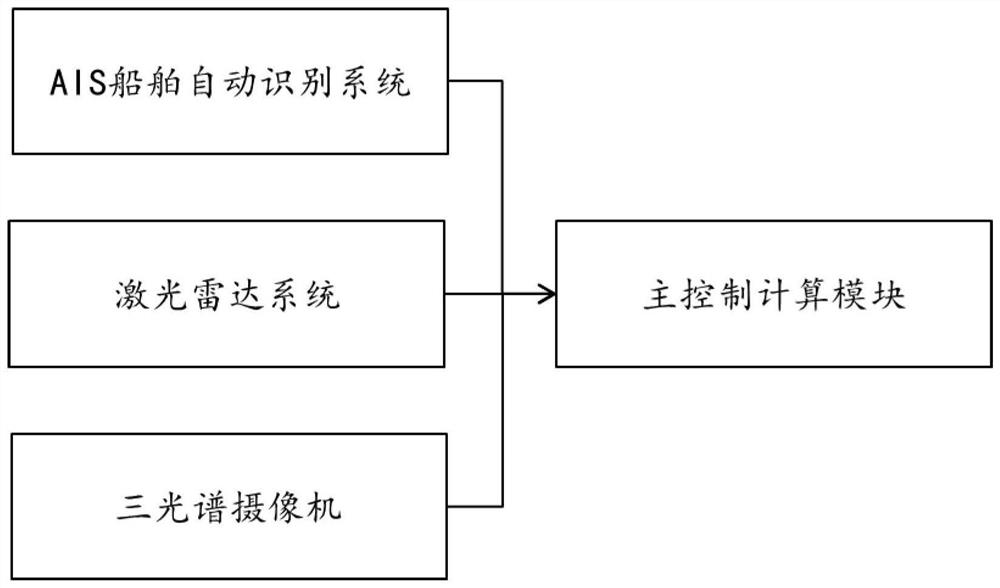
[0066] S1: The automatic ship identification system AIS collects the real-time three-dimensional geographic coordinates of the ship, and the real-time real three-dimensional geographic coordinate matrix formed by the collected real-time real three-dimensional geographic coordinates is X real =(x real ,y real ,z real ,1) T , where x real is the real x-axis coordinate of the ship, y real is the real y-axis coordinate of the ship, z real is the real z-axis coordinates of the ship; the real-time real-time three-dimensional geographic coordinate matrix X real Form a real 3D point cloud; use the following formula to convert the real 3D point cloud into a real 2D image point matrix Y real :
[0067] Y real =T real x real
[0068] Among them, T real is the real 3D point cloud transformation matrix, d i is the...
Embodiment 3
[0080] Such as figure 1 As shown, the target recognition method based on multivariate information fusion provided in this embodiment includes the following steps;
[0081] S1: The automatic ship identification system AIS collects the real-time three-dimensional geographic coordinates of the ship, and the real-time real three-dimensional geographic coordinate matrix formed by the collected real-time real three-dimensional geographic coordinates is X real =(x real ,y real ,z real ,1) T , where x real is the real x-axis coordinate of the ship, y real is the real y-axis coordinate of the ship, z real is the real z-axis coordinates of the ship; the real-time real-time three-dimensional geographic coordinate matrix X real Form a real 3D point cloud; use the following formula to convert the real 3D point cloud into a real 2D image point matrix Y real :
[0082] Y real =T real x real
[0083] Among them, T real is the real 3D point cloud transformation matrix, d i is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More