

Torque balancing driving device for rotating shaft and executing arm mechanism of surgical robot
A surgical robot and driving device technology, applied in surgical manipulators, surgical robots, surgery, etc., can solve the problems of reducing the service life of the main driving device, limiting the length of the swing arm, and occupying a large space, so as to facilitate small integration, The effects of improved execution stability and high degree of integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
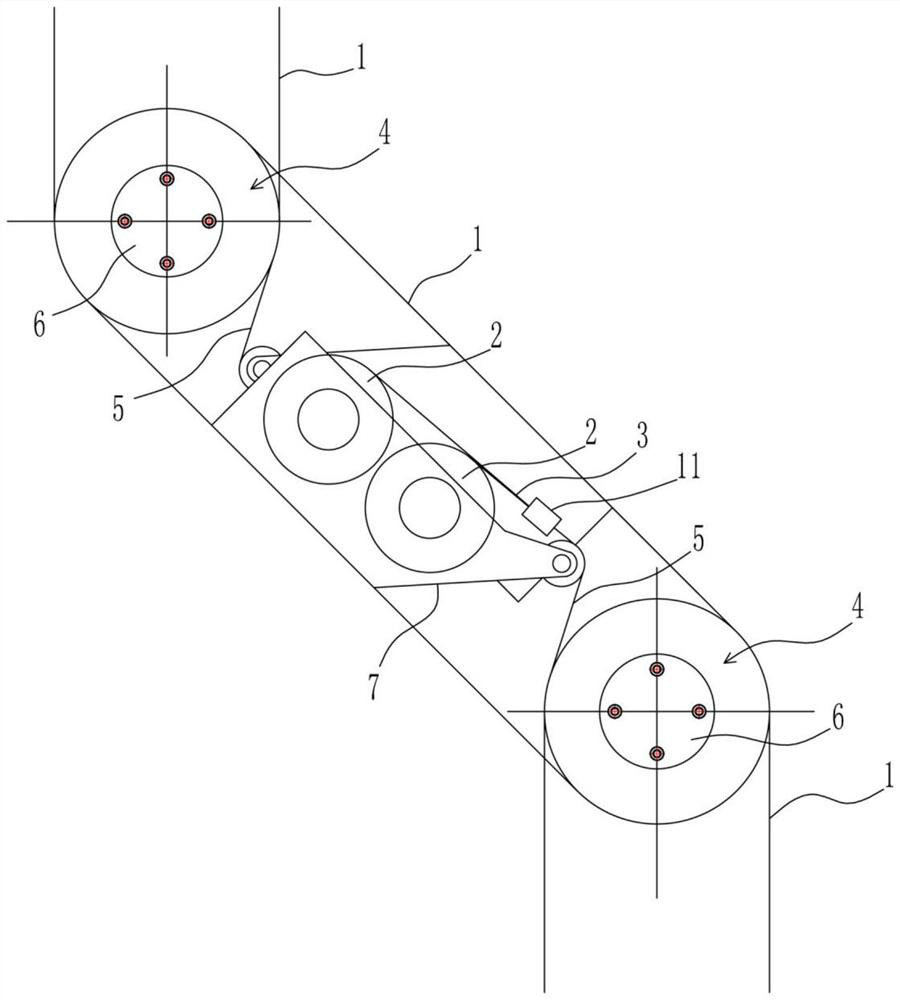
[0041] This embodiment discloses a torque balance driving device for a rotating shaft, which is mainly used to offset or partially offset the torque of the shaft structure in the process of relative rotation between adjacent arms. The torque load of the driver mounted thereon is reduced.
[0042] like figure 1 As shown, it includes two adjacent arm rods 1, two adjacent arm rods 1 are rotatably connected, a balance device is fixed on the arm rod 1, and the balance device and the two adjacent arm rods 1 are connected The shaft structure 4 is fixedly connected, and when the two arm rods 1 rotate relative to the connecting shaft structure 4 between the two arm rods 1, the balancing device stretches or contracts accordingly to offset or partially offset due to the arm rod 1 itself The torque on the axle structure 4 due to the weight and / or the weight of the load thereon.
[0043] like figure 1 and 2 As shown, preferably, the tensile end of the constant force spring is fixedly c...
Embodiment 2
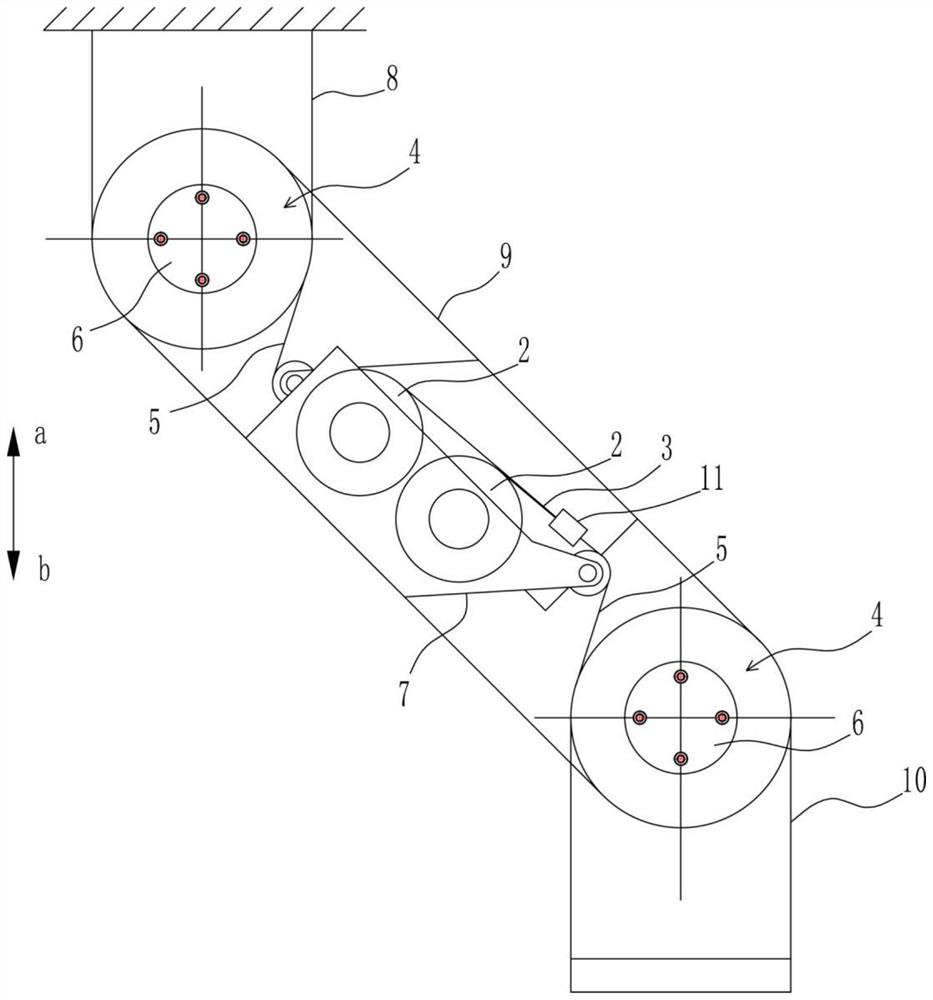
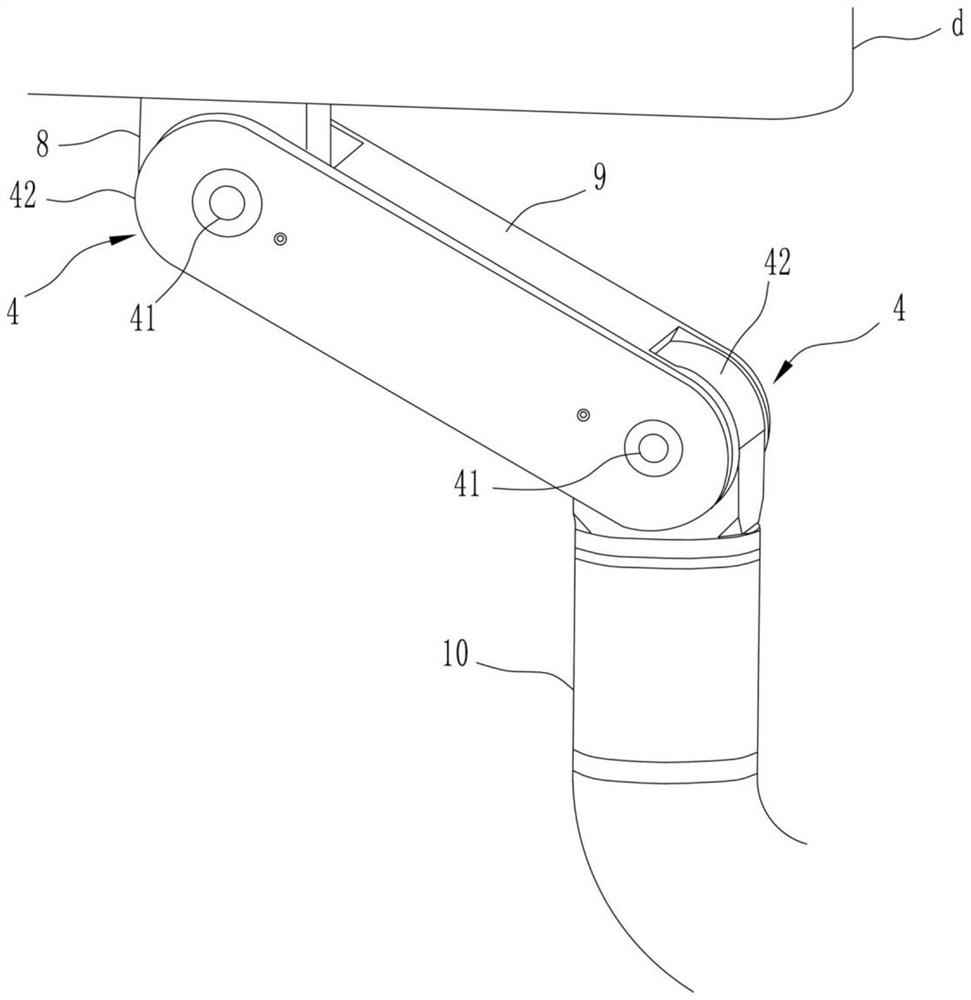
[0056] like Figure 4 As shown, referring to other drawings, the present invention also discloses an actuator arm mechanism of a surgical robot, which applies the torque balance driving device for a rotating shaft in Embodiment 1.
[0057] In use, the first arm rod 8 is a fixed arm section, the second arm rod 9 and the third arm rod 10 are movable arm sections, the first arm rod 8 is fixedly connected to the body of the equipment, and the third arm rod 10 is far away from the equipment. The end is fixedly provided with a surgical operation implement. A plurality of constant force springs 2 are fixedly arranged inside the second arm rod 9 .
[0058] In use, the actuator arm mechanism is assembled in the surgical robot system, and the intelligent control module in the surgical robot system issues motion instructions to the drive device in the actuator arm mechanism.
Embodiment 3
[0060] As shown in Figures 5 to 8, with reference to other accompanying drawings, this embodiment makes further optimizations on the basis of Embodiment 1:
[0061] Refer to the attached Figure 5 and 6 , In this embodiment, the balancing device e includes an elastic assembly and an assembly box capable of accommodating the elastic assembly, the elastic assembly includes a center body, and a constant force spring is fixedly arranged on the center body.
[0062] like Figure 7 As shown, further, the elasticity generally includes a center body and a force distribution plate sleeved on the center body, the force distribution plate is fixedly connected with the center body, and a plurality of constant force springs are integrated on the force distribution plate. The side wall of the assembling box is provided with a guide hole for the rope body to pass through. The rope body penetrates the assembly box from the guide hole and is fixedly connected with the tension end of the con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More