Active auditory positioning method for map-free navigation
A positioning method and auditory technology, applied in the field of information science, can solve the problems of poor real-time performance, obstacles blocking the field of view, and has not been introduced into robots without map navigation, etc., to achieve good fusion effect and high application value.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
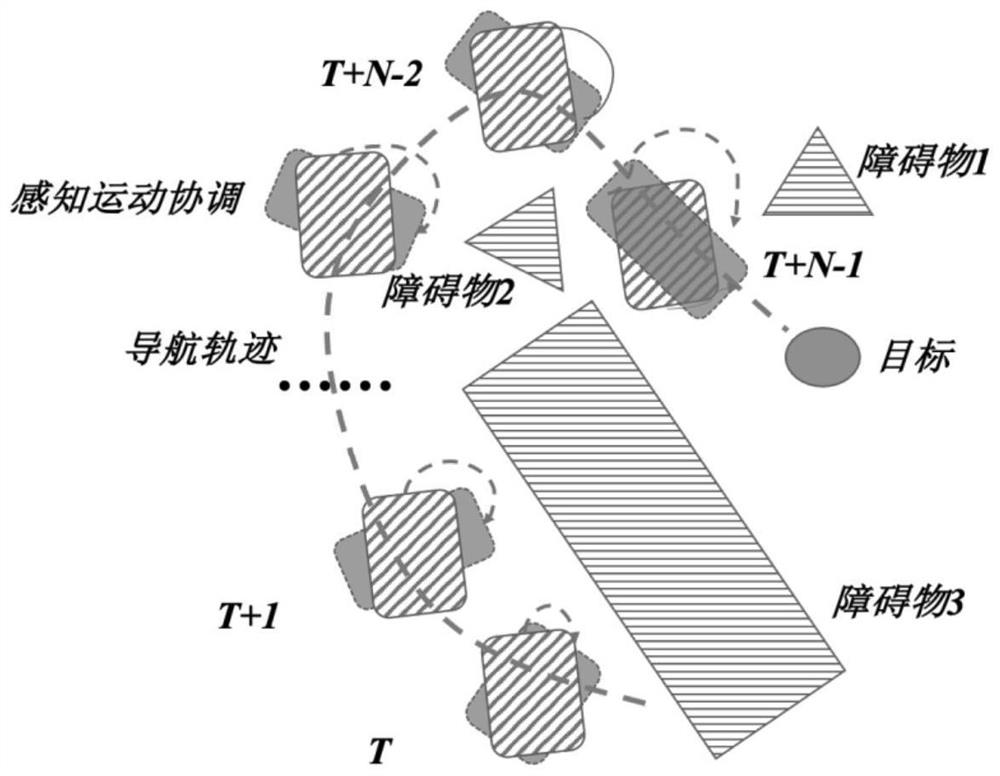
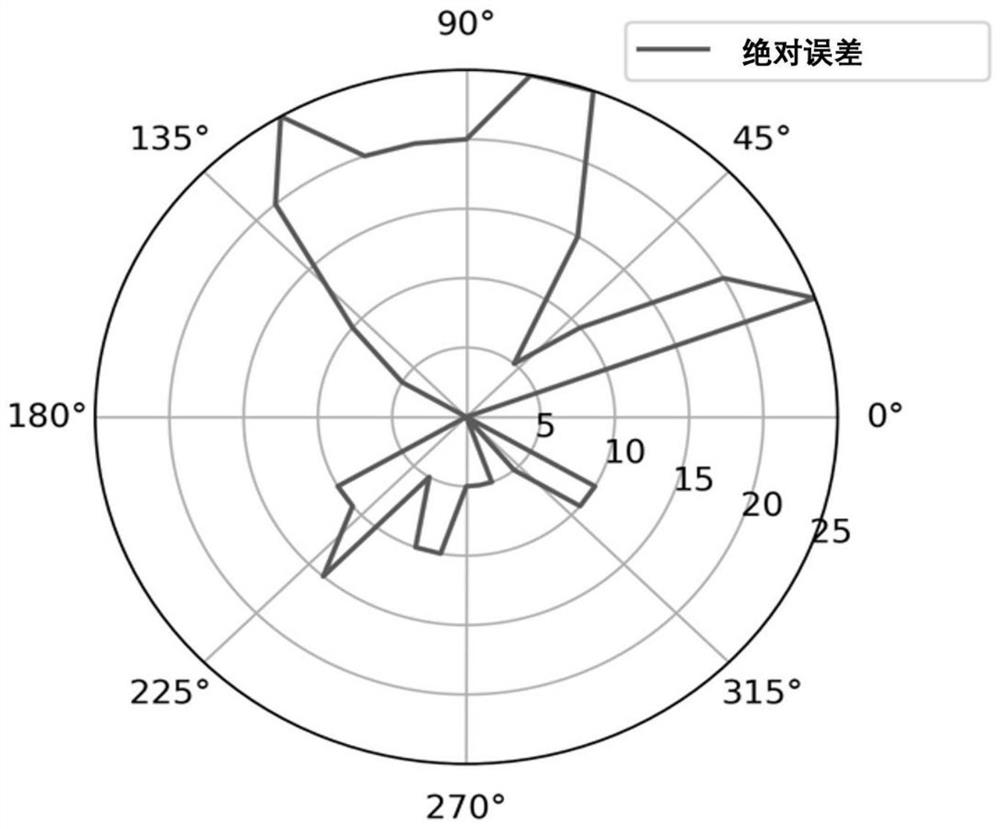
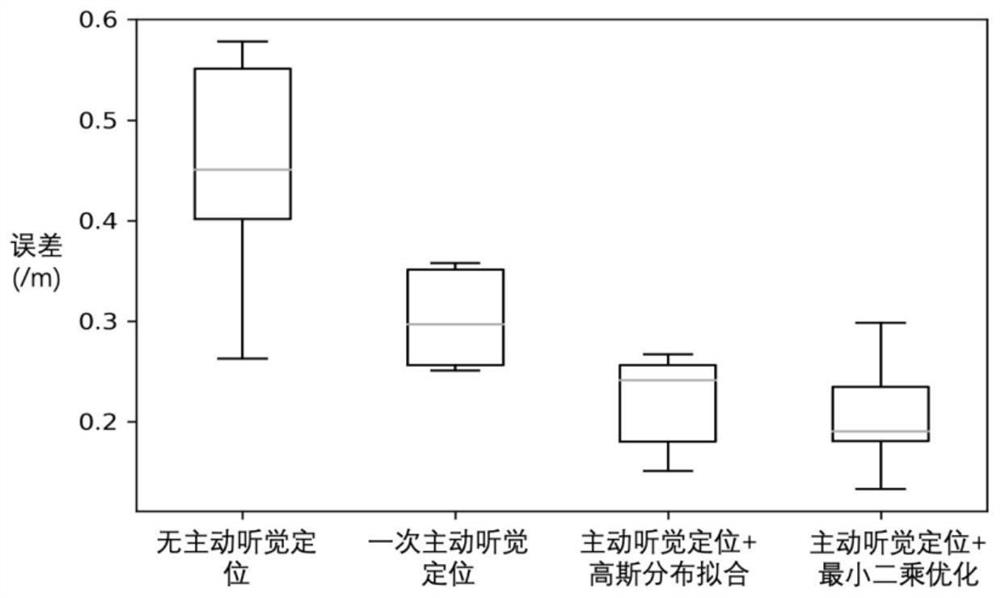
[0032] In order to enable the mobile robot to realize collision-free navigation in the actual unknown scene, the present invention proposes an active sound source localization technology for mapless navigation. The present invention proposes a target-oriented end-to-end navigation model for robot platforms through reinforcement learning. The model can learn a complex policy: the robot chooses how to move based on environmental information, including raw 2D laser ranging results and object positions. At the same time, in order to apply the model trained in the simulation environment to the real environment, we set up active auditory positioning to determine the relative position of the target. figure 1 It shows how the robot continuously determines the target position by adjusting its own pose during the navigation process. figure 2 is the measurement error of the target position in different directions determined by the spherical microphone array. In order to quantitatively...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More