

Overhead line whole-course inspection robot and method
A technology for inspection robots and overhead lines, applied in the directions of overhead lines/cable equipment, program-controlled manipulators, manipulators, etc. The effect of ensuring the safety and reliability of obstacle crossing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0063] A whole-process inspection robot for overhead lines is applied to overhead transmission lines. In this embodiment, two walking arms are used as an example for description, but it does not mean that there can only be two walking arms.
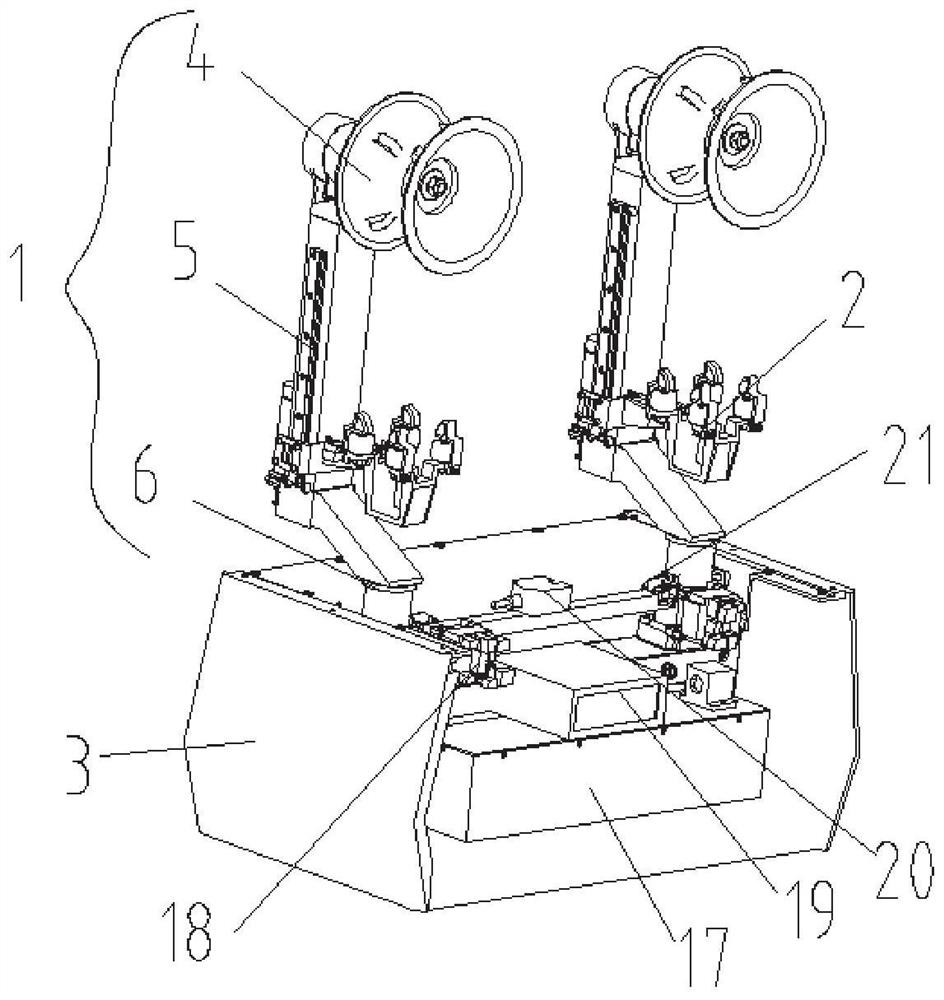
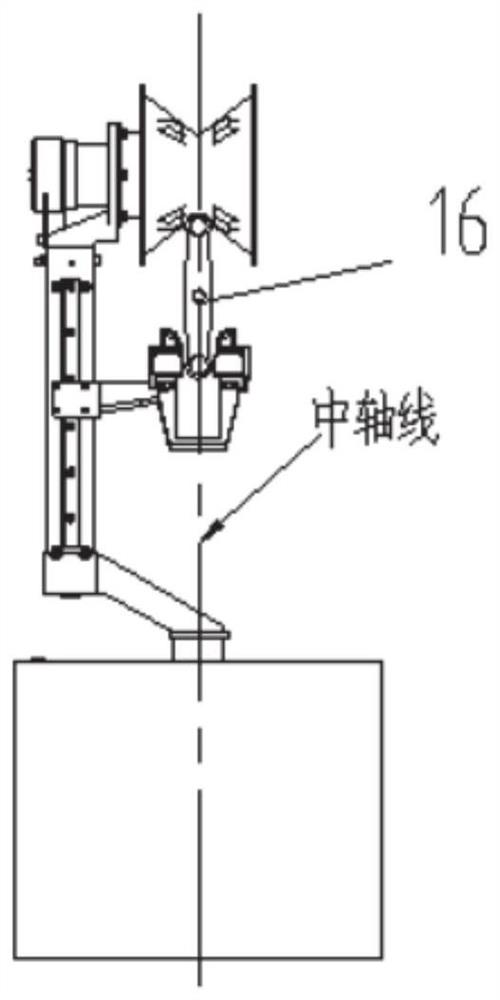
[0064] like figure 1 , figure 2 As shown, the inspection robot includes a walking arm, a guide part and a control box part, which is used to run along the overhead transmission line and the tower track 16, and autonomously span the anti-vibration hammer, the linear tower and the tension tower to realize the robot's inspection of the overhead line 23.
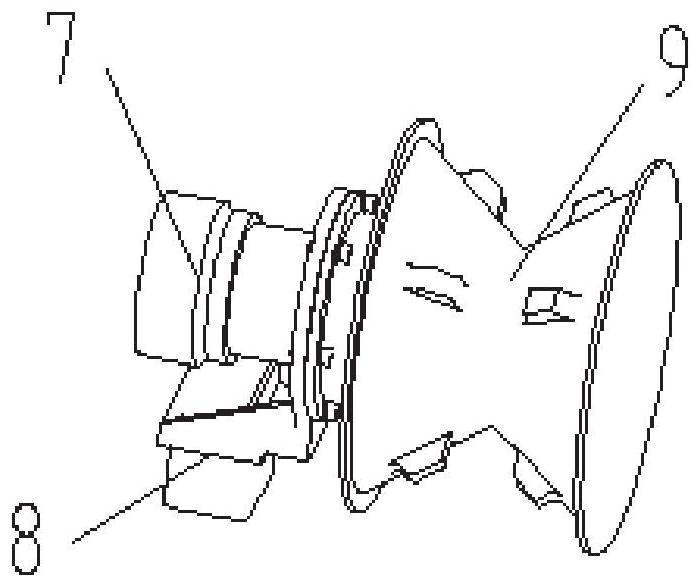
[0065] The walking arm 1 is symmetrically arranged on the top of the control box part 3 in a vertical state, and is used to drive the robot to run in a straight line along the overhead transmission line and adapt to the variable curvature track 16 of the tower 22; The part 5 and the motor directly drive the rotating part 6, and each lifting part 5 is provided with a guide part 2, which ca...
Embodiment 2
[0078] In this embodiment, the difference from the first embodiment is that the inspection robot further includes an auxiliary pressing device.
[0079] In order to ensure that those skilled in the art can understand the technical solution more clearly, the parts consistent with the first embodiment, except the necessary parts, are not reflected in the drawings of this embodiment.
[0080] The auxiliary pressing device is arranged beside the traveling wheel 4 . When there are two traveling wheels 4 , it can be arranged at the front end of the front traveling wheel 4 and the rear end of the rear traveling wheel 4 .
[0081] Of course, in other embodiments, the setting of the auxiliary pressing device can be adjusted. The reason for setting the auxiliary pressing device is mainly that when the robot is climbing a slope, the auxiliary pressing device is in contact with the overhead line to improve the relationship between the robot and the overhead line. friction to avoid slippin...
Embodiment 3
[0093] A robot inspection method for overhead line inspection provided by the application embodiment 2, comprising the following steps:
[0094] When running on an overhead line, control the direct-drive rotating part of the motor to be in a locked state, keep the walking arm parallel to the overhead line, ensure the robot travels in a straight line, and detect the overhead line;
[0095] When running on a sloping overhead line, determine the inclination angle of the robot and the line, and control the compression degree of the auxiliary pressing piece and the line to ensure the safe walking of the robot;
[0096] When running on the ground track, control the walking arm and the motor to directly drive the rotating parts according to the running state of the robot, so that the robot can maintain a balanced running state.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More