Mechanical transmission decoupling method for multi-axis robot
A multi-axis robot and mechanical transmission technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of increasing robot calculation and control accuracy errors, increasing the complexity of control and control algorithms, and different speed adjustment ranges. The difficulty of control, low requirements, and the effect of reducing accuracy errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0072] The present invention will be described in detail below with reference to the accompanying drawings. The description in this part is only exemplary and explanatory, and should not have any limiting effect on the protection scope of the present invention. In addition, according to the description in this document, those skilled in the art can make corresponding combinations of features in the embodiments in this document and in different embodiments.
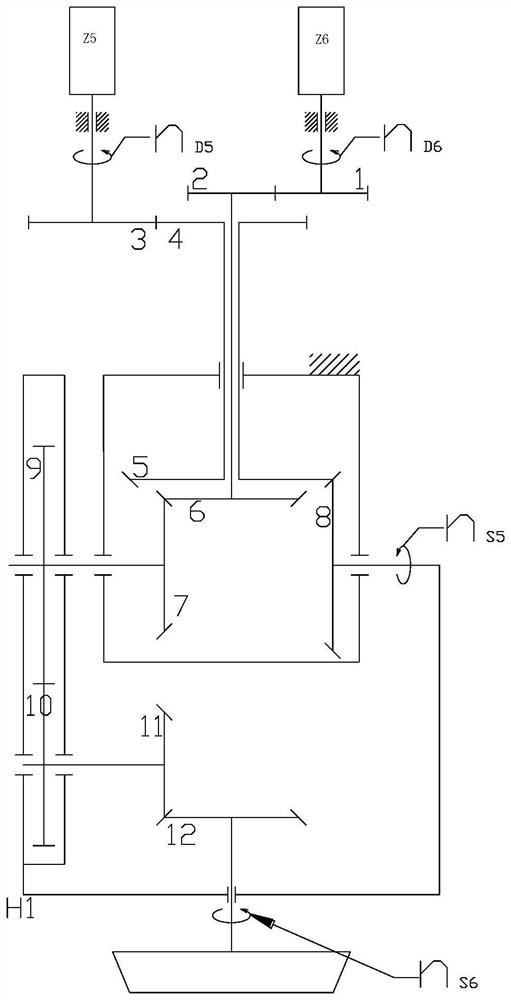
[0073] Examples of the present invention are as follows, refer to figure 1 , a method for decoupling the mechanical transmission of a multi-axis robot, comprising the following steps:
[0074] (1) The original mechanical transmission condition is analyzed and refined, and the original transmission function relationship is obtained, in which the rotational speed of the working unit of one axis is the dependent variable, and the factor affecting the rotational speed of the working unit of the axis is the independent variable...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More