

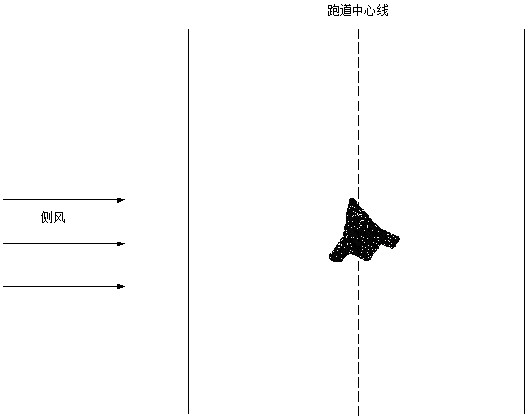
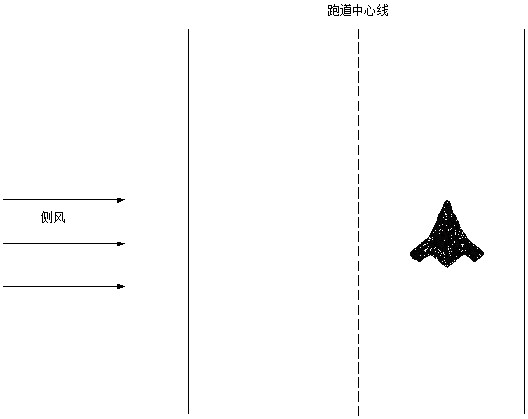
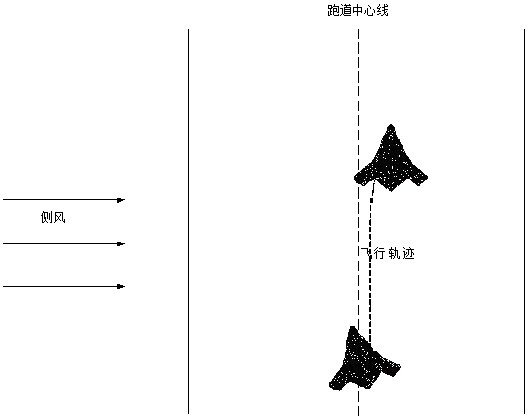
Planning and control method for landing of unmanned aerial vehicle in crosswind environment
A control method and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problem that the sideslip angle cannot be reduced, and achieve the effect of strong flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0049] A method for planning and controlling UAV landing in a crosswind environment according to this embodiment, comprising:
[0050] Step S1. Collect the parameters of the lateral and yaw motion state of the aircraft, the parameters of the longitudinal motion state, and the environmental parameters through the airborne sensors;
[0051] Step S2. Predict the landing time of the aircraft according to the data collected by the airborne sensors, and judge the start time of trajectory planning;
[0052] Step S3. Taking the UAV’s lateral deviation distance, lateral deviation speed, roll angle, and heading angle at the beginning of trajectory planning as the initial planning parameters, determine the aircraft’s terminal state constraint parameters according to the aircraft’s use restrictions, and combine the aircraft’s current wind speed and Wind direction, using the MPC planning algorithm to plan the lateral flight trajectory of the UAV;
[0053] Step S4. Use the planning result ...
Embodiment 2
[0057] This embodiment is further optimized on the basis of Embodiment 1. In this embodiment, the parameters obtained by the airborne sensor are used as the input of the crosswind landing plan of the UAV, and the lateral motion parameters and the longitudinal motion parameters of the aircraft motion collected by the airborne sensor, Rely on weather radar acquisition or airborne sensor parameters to solve environmental parameters. It can better deal with the situation of strong cross wind.
[0058] Other parts of this embodiment are the same as those of Embodiment 1, so details are not repeated here.
Embodiment 3
[0060] This embodiment is further optimized on the basis of the above-mentioned embodiment 1 or 2. In this embodiment, the motion parameters can be obtained according to the on-board sensors, and the wind speed and wind direction can be obtained by weather radar or according to the parameters measured by the sensors through an algorithm. Calculation methods commonly used by those skilled in the art. When the aircraft is descending, use the integrated navigation system sensor to measure and record the lateral movement parameters, these parameters include: lateral deviation distance from the runway center line, lateral deviation speed, yaw angle and roll angle; radio altimeter, air data The system or satellite navigation system measures and records the longitudinal motion parameters of the aircraft. The longitudinal motion parameters of the aircraft include the height of the aircraft and the sinking rate of the aircraft. The data measured by weather radar or based on the inertial...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More