

Random nonlinear multi-agent reinforcement learning optimization formation control method
A multi-agent, reinforcement learning technology, applied in the direction of adaptive control, comprehensive factory control, general control system, etc., can solve complex algorithms, difficult to apply and popularize random multi-agent systems, difficult to optimize design and other problems, to achieve The effect of mitigating complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] The technical solutions in the embodiments of the present invention will be clearly and completely described in further detail below with reference to the accompanying drawings in the embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
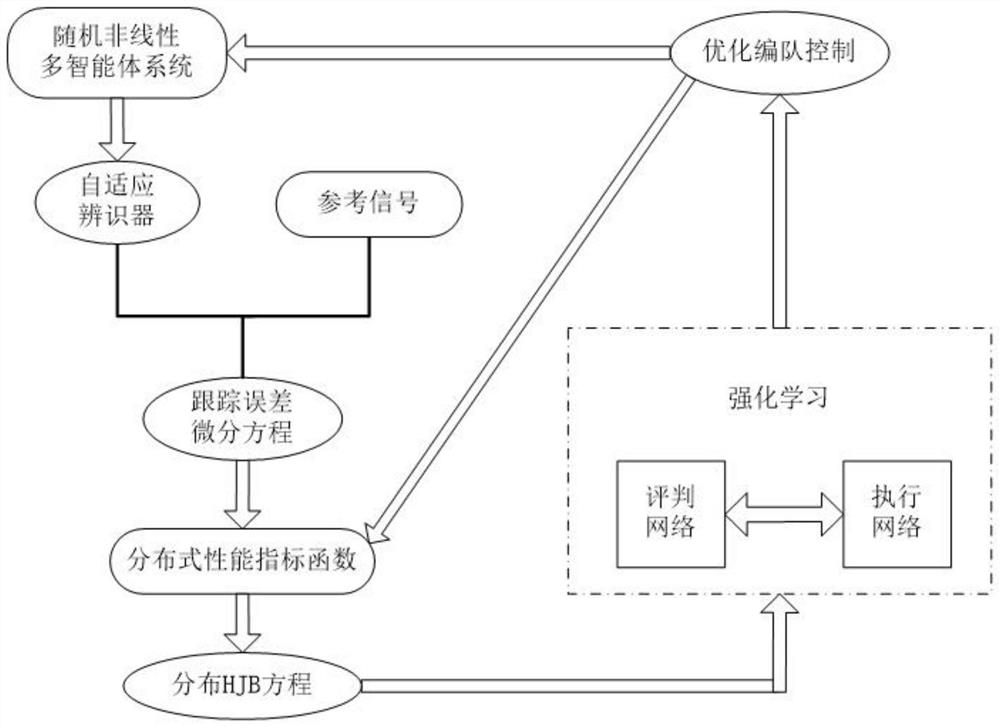
[0048] like figure 1 As shown, for the stochastic nonlinear multi-agent system with unknown dynamics, an optimal formation control method of stochastic nonlinear multi-agent based on reinforcement learning is provided. The specific contents are as follows:
[0049] 1. System Modeling and Problem Statement
[0050] Consider the following stochastic nonlinear multi-agent system, whose interconnection and communication topology between agents is an undirected connected graph:
[0051] dx i (t)=(u i +f i (x i ))dt+ψ i (x i )dw,i=1,...,n (1)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More