

Route planning method and equipment based on path search and intelligent optimization, and medium
An intelligent optimization and path search technology, applied in navigation computing tools, instruments, computing and other directions, can solve the problems of long computing time, insufficient convergence, large memory space consumption, etc., to achieve rapid planning and increase population diversity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
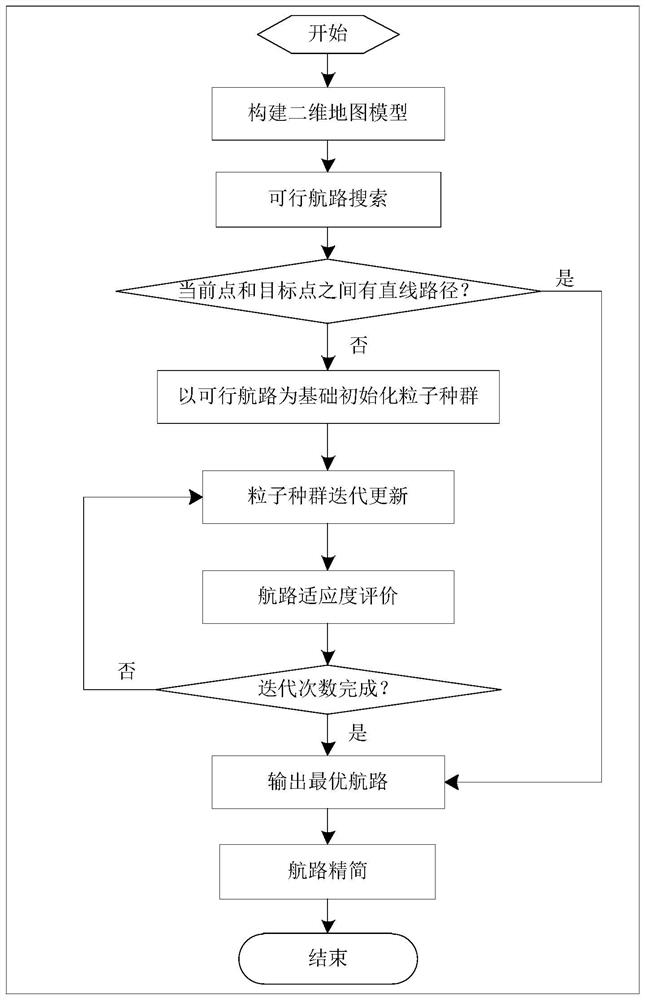
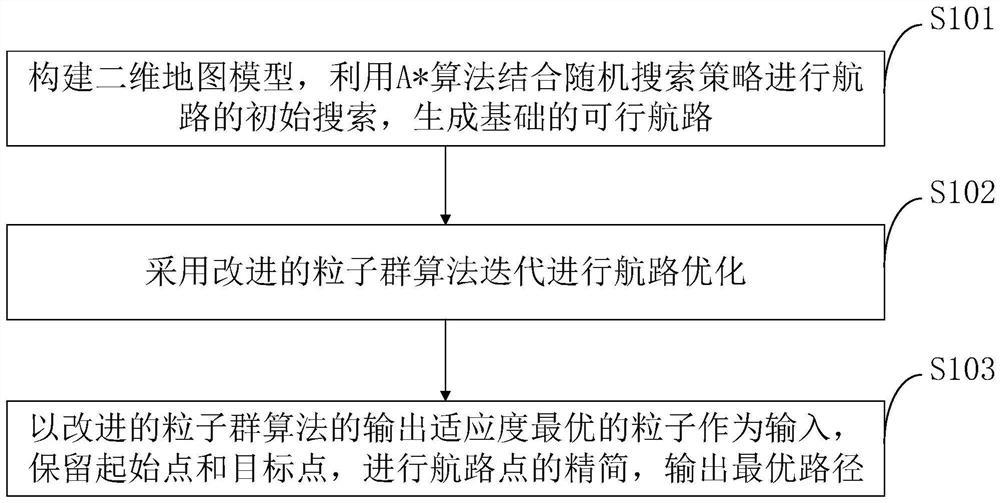
[0095] The basic principle of the present invention is as follows figure 1 As shown, the route planning method based on path search and intelligent optimization proposed by the present invention divides the process of emergency area planning into basic route initialization, route optimization, and route point simplification. The basic route initialization phase completes the initial search of the route and generates a basic feasible route; the route optimization phase completes the intelligent optimization of the waypoints to improve the fitness of the route; the waypoint reduction phase completes the route point simplification and improves the flightability of the route.
[0096] (1) Basic route initialization includes the following steps:
[0097] 1) Build a 2D map model
[0098] Load the terrain map, intercept the terrain at a certain cruising altitude to generate a two-dimensional map, obtain terrain obstacle parameters, take the circumcircle of each terrain obstacle area...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More