

Visual servo method based on image error weighted vector
A weighted vector and visual servoing technology, applied in the field of robot visual servoing, can solve the problems of huge time and computing power overhead, difficulty in ensuring the quality of control points, and difficulty in guaranteeing the quality of feature points. The effect of small control errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Embodiments of the present invention are described in detail below. The embodiments described below with reference to the accompanying drawings are exemplary, and are intended to explain the present invention and should not be construed as limiting the present invention.
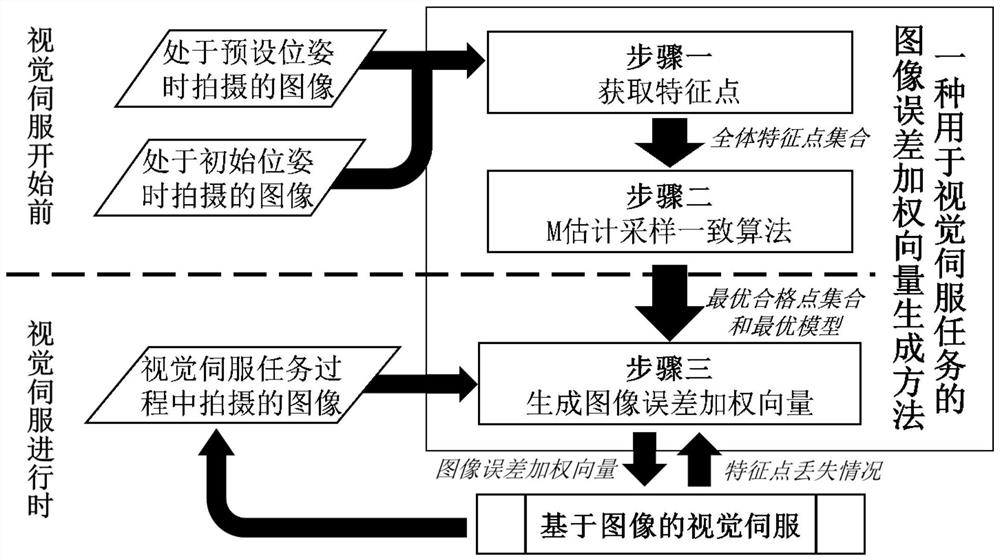
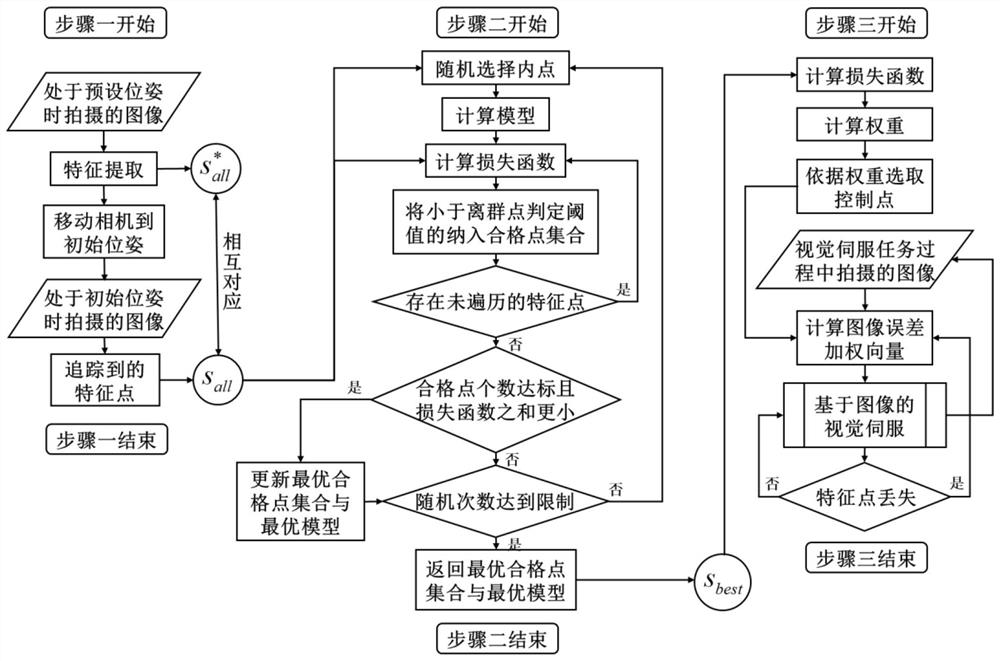
[0035] like figure 1 and 2 As shown, the present invention comprises the following steps:
[0036] Step 1: Obtain the target images taken when the camera in the visual servoing task is in the initial pose and the preset pose, respectively, and then use the feature extraction algorithm to extract the feature points of the target image when the camera is in the initial pose and the preset pose, respectively. Then, the initial and expected overall feature point sets are obtained respectively; the feature points in the initial and expected overall feature point sets are in one-to-one correspondence; feature extraction algorithms such as SIFT, SURF, ORB and other algorithms.
[0037] Step 2: According t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More