

Active suspension system control method based on beneficial disturbance, coupling and nonlinearity
A technology of active suspension and control method, applied in elastic suspension, suspension, transportation and packaging, etc., can solve the problems of system parameter/model uncertainty, incomplete state coupling, no control method, etc., to achieve good tracking Control performance and stability performance, improve robustness, eliminate the effect of state coupling effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
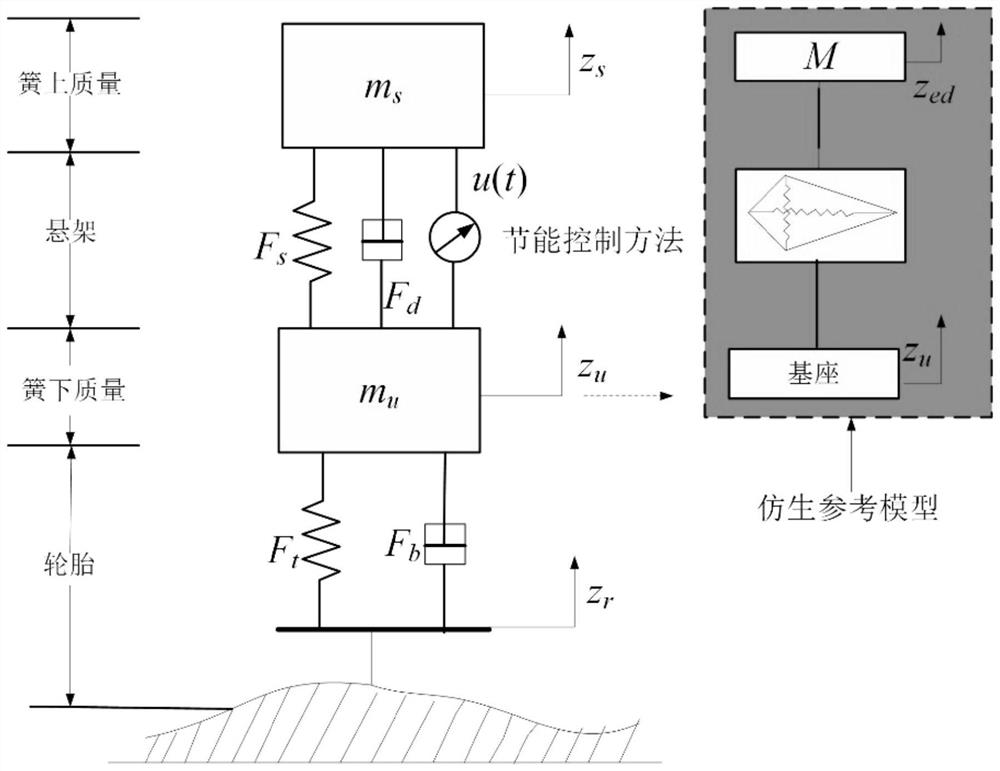
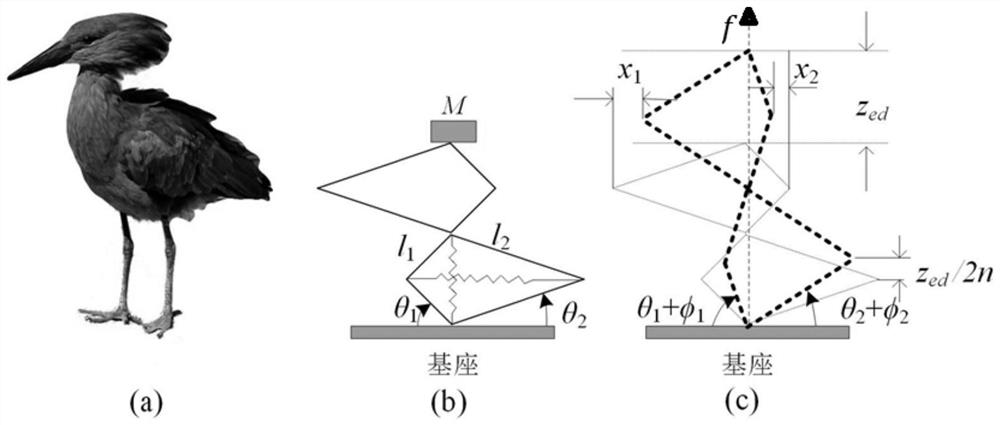
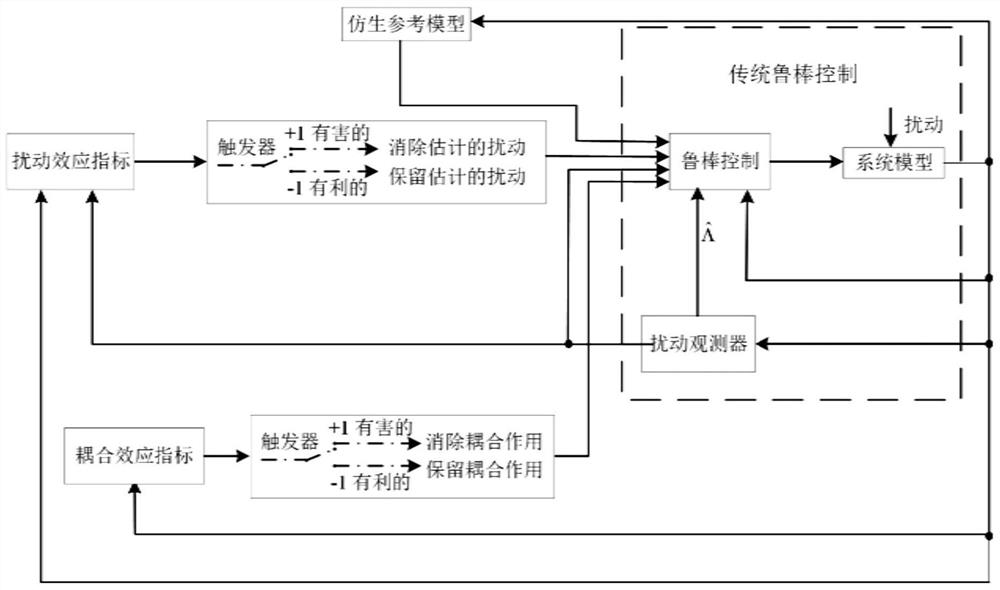
[0066] This embodiment provides an energy-saving and robust control method for an active suspension system based on beneficial disturbance, coupling and nonlinearity. Different from existing control methods, this embodiment considers robustness, disturbance, inherent nonlinear factors, For problems such as state coupling effect and energy consumption, make full use of nonlinear stiffness and damping effects to construct a bionic nonlinear reference model, and accurately estimate the set including parameter uncertainty, unmodeled dynamic uncertainty and external disturbance through fuzzy disturbance observer. Disturbance; design state coupling effect index and disturbance effect index, and judge the influence of state coupling and disturbance factors; finally, Lyapunov theorem is used to ensure the asymptotic stability of active suspension system. It has good transient response characteristics and significant energy saving effect.
[0067] Specifically include the following ste...
Embodiment 2
[0247] This embodiment provides an active suspension system control system based on beneficial disturbance, coupling and nonlinearity, including:
[0248] a model building module configured to construct a bionic nonlinear reference model of the active suspension system, using the output of the bionic nonlinear reference model as a desired trajectory;
[0249] a disturbance estimation module configured to construct a fuzzy disturbance observer to estimate ensemble disturbances in the biomimetic nonlinear reference model;
[0250] The tracking control module is configured to define a state coupling effect index and a disturbance effect index, and judge whether the state coupling and ensemble disturbance in the bionic nonlinear reference model are beneficial according to the two effect indexes, thereby constructing a tracking considering the beneficial state coupling and the beneficial disturbance A controller to cause the suspension travel of the active suspension system to foll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More