

Vision controlling platform for opened industrial robot
A technology of industrial robots and control platforms, applied in manipulators, manufacturing tools, etc., can solve the problems of adjusting light intensity, without automatic adjustment of pan/tilt, automatic adjustment of focal length and aperture, and closed structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
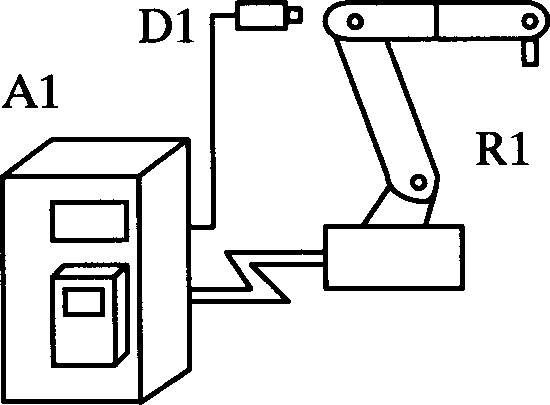
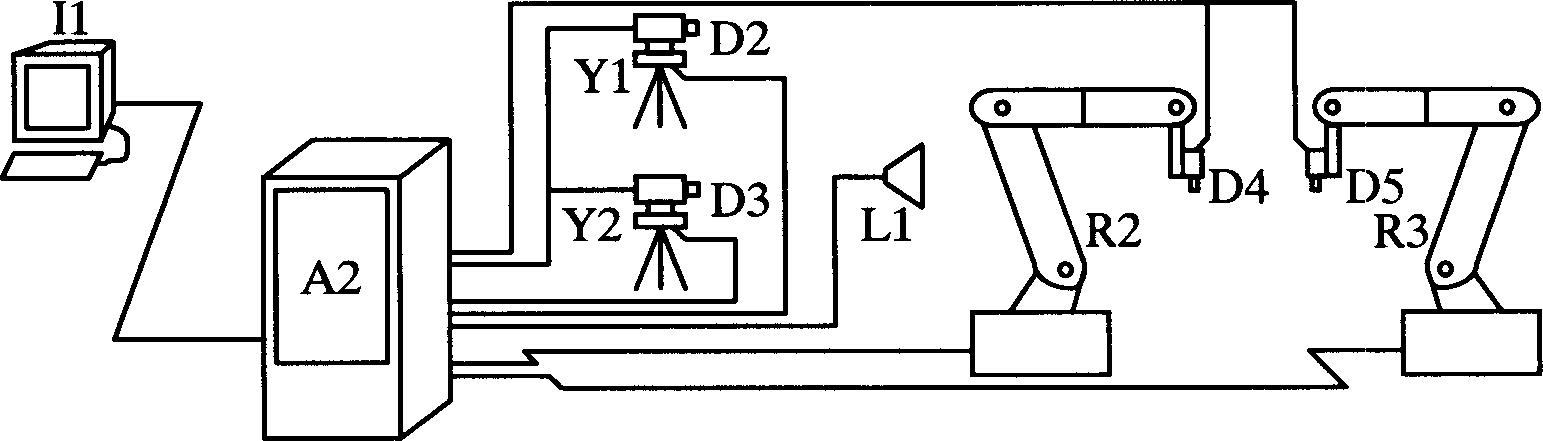
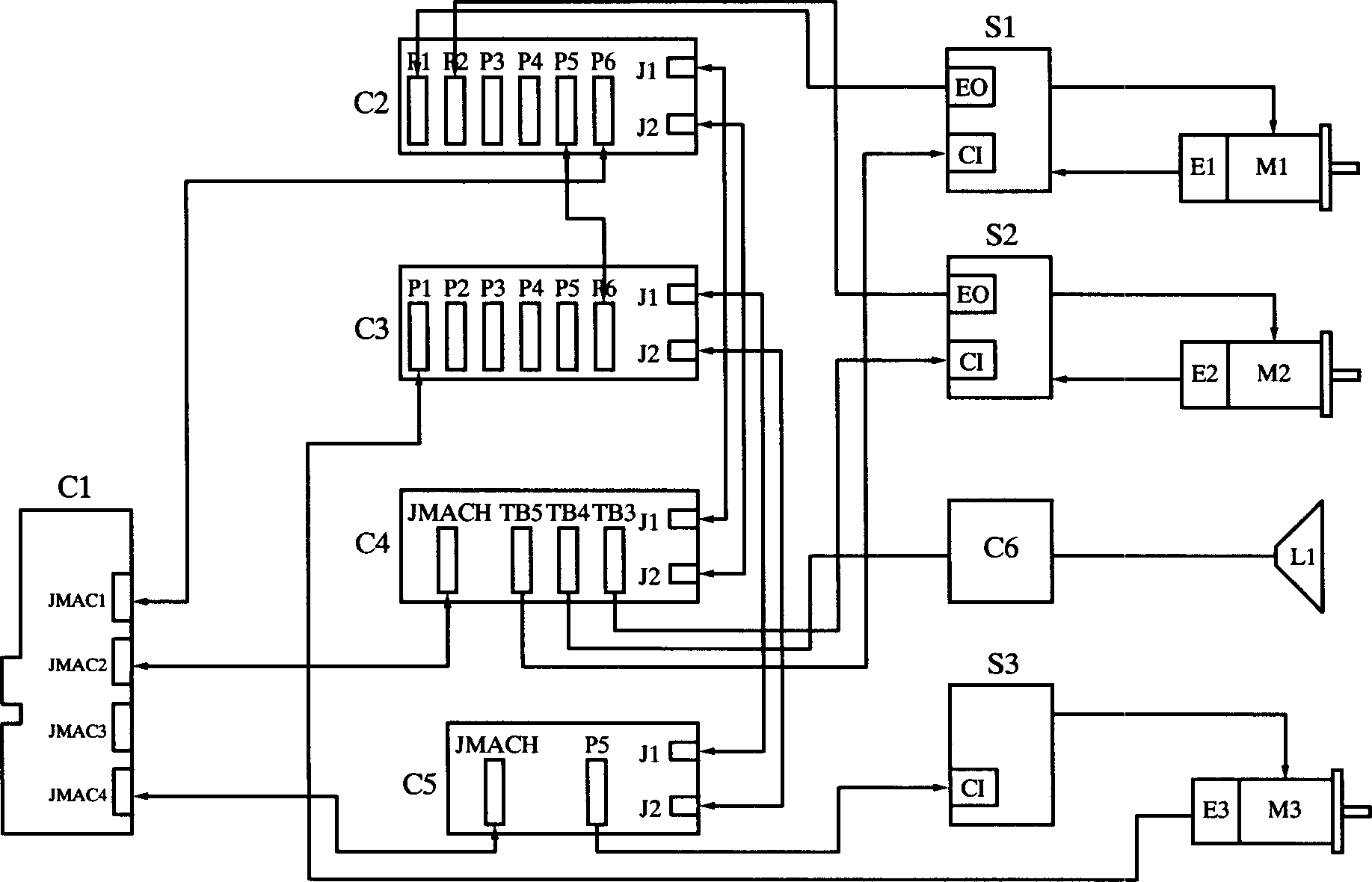
[0024] This control platform passes image 3 The circuit shown realizes the control of servo motors, multi-degree-of-freedom pan-tilt and dimmable lighting of different robots. In the embodiment, an open industrial robot vision platform composed of an industrial robot, an open industrial robot controller, two CCD cameras, a video capture card, and a controllable pan / tilt is built. The industrial computer can use ADVANTECH-610, and the Yaskawa YASKAWA MOTOMAN SK10 robot body as the control object. The two servo packages use the Japanese YASKAWACACR-SR15SZ1SD-Y214 single-axis drive servo package and the DELTA TAU four-axis drive servo package. The former is The voltage-controlled servo package is used to drive the robot’s S, L, U and R joints. The latter is a PWM wave-controlled servo package used to drive the B and T joints of the robot’s wrist. The camera uses The SONY Digital Hyper HAD color camera and video capture card use PCI bus OK-C80 / M capture card, and the pan / tilt uses Y30...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More