

Articulated type double-rotor flying robot
A flying robot, articulated technology, applied in the field of robotics, can solve the problems of flight control uncertainty, inconsistency of hysteresis effect, difficulty in size miniaturization, etc., to reduce production cost and miniaturization difficulty, improve design mode, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
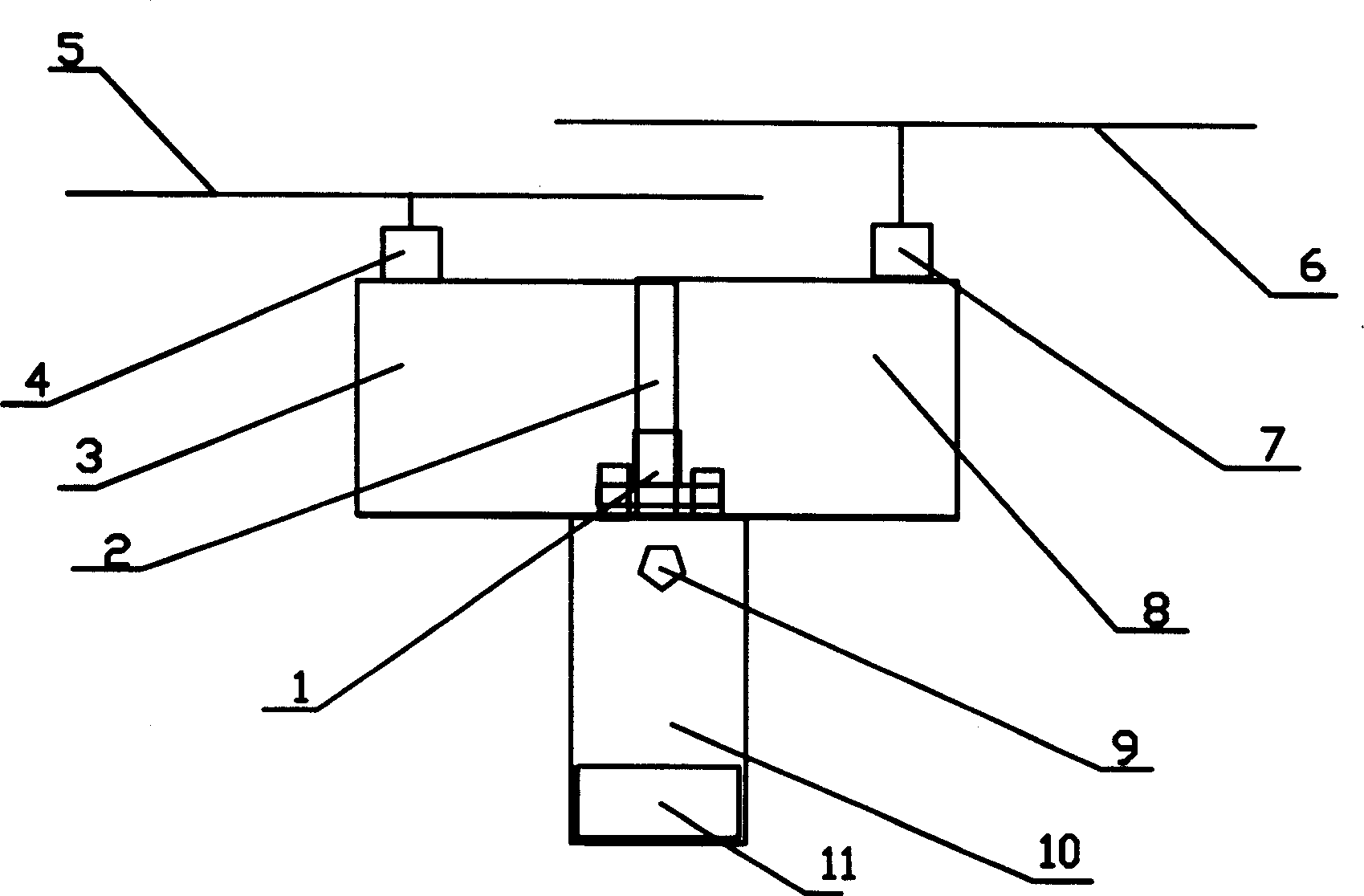
[0010] Such as figure 1 As shown, the present invention comprises: Hooke hinge controller 1, Hooke hinge 2, left aileron 3, left rotor controller 4, left rotor 5, right rotor 6, right rotor controller 7, right aileron 8. Attitude sensor 9 , body 10 and power source 11 . The connection relationship is: the left rotor 5 and the left rotor controller 4 are directly fixed on the left aileron 3, the right rotor 6 and the right rotor controller 7 are directly fixed on the right aileron 8, the left aileron 3 and the right aileron 8 are hinged together through the Hooke hinge 2, and the Hooke hinge drive controller 1 automatically generates and executes the Hooke hinge drive command according to the signal of the attitude sensor 9 and the external action command. The body 10 is installed under the left aileron 3 and the right aileron 8 , the attitude sensor 9 is installed in the center of the body 10 , and the power source 11 is installed in the bottom of the body 10 .
[0011] The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More