

Assemblied anthropomorphic manipulator based on imbedded shape memory alloy electric machine
A memory alloy, embedded technology, used in manipulators, manufacturing tools, chucks, etc., can solve problems such as limited clamping capacity, and achieve the effects of low manufacturing cost, light weight and flexible control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] Below in conjunction with accompanying drawing and example the present invention is described in further detail.
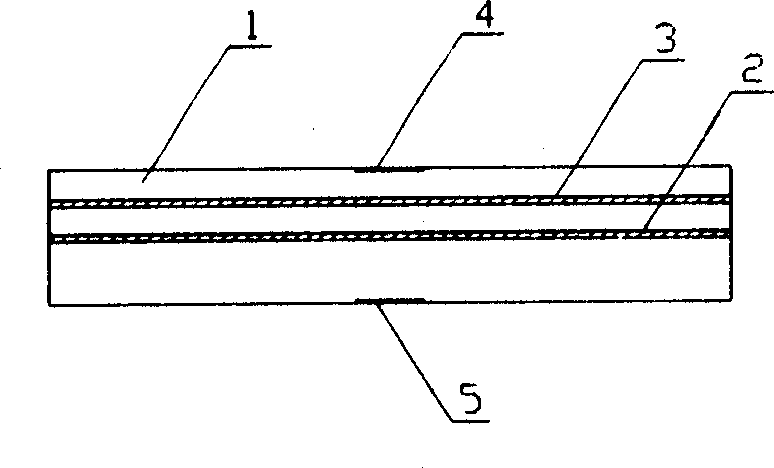
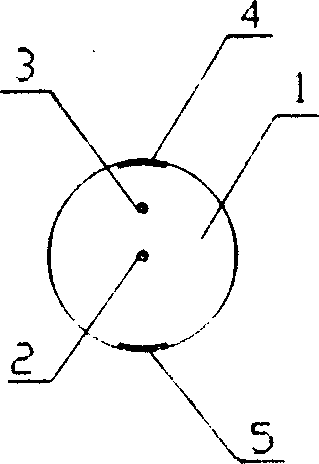
[0013] Such as figure 1 and figure 2 As shown, the embedded shape memory alloy motor (ESMAA) includes: a silicone rubber cylinder 1, a "U" shape memory shape memory alloy (SMA) wire 2, a linear shape memory SMA wire 3, and symmetrically distributed curvature sensors 4 and 5 . The embedding position of the "U" shape memory SMA wire 2 coincides with the central axis of the silicone rubber cylinder 1, the linear memory SMA wire 3 is embedded eccentrically parallel to the central axis of the silicone rubber cylinder 1, and the curvature sensors 4 and 5 are symmetrically distributed along the bending direction. The middle surface of the silicone rubber cylinder 1 . The "U" shape memory SMA wire 2 has a recovery function, and the straight memory SMA wire 3 has a recovery function, so that this ESMAA has a plane bending function.
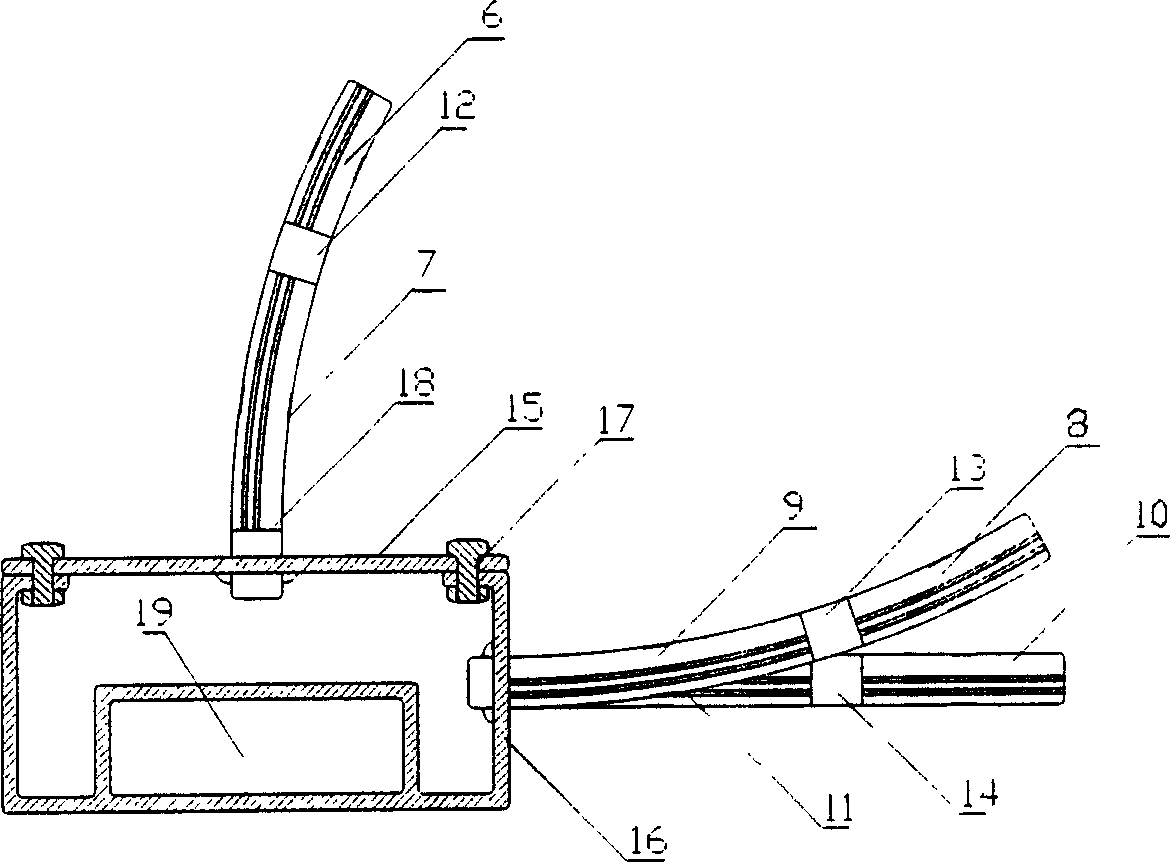
[0014] Such as image 3 ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More