

Endoscopic auxiliary manipulator for surgery of nasal cavity
A technology for assisting machinery and endoscopy, applied in the direction of endoscopy, surgery, surgical forceps, etc., can solve the problems of delaying operation timing, wasting operation time, and not yet discovered, and achieve the effect of reducing operation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
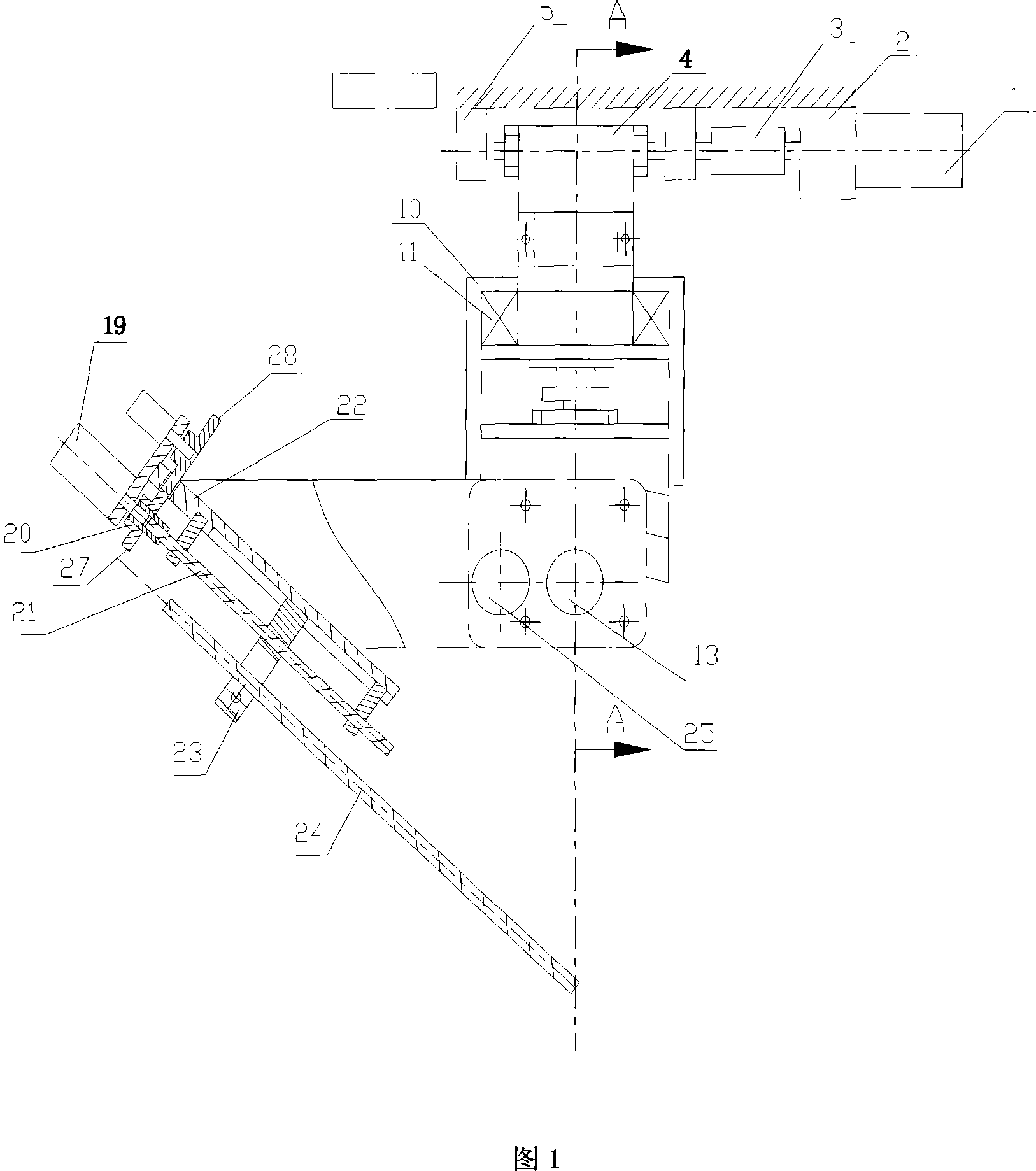
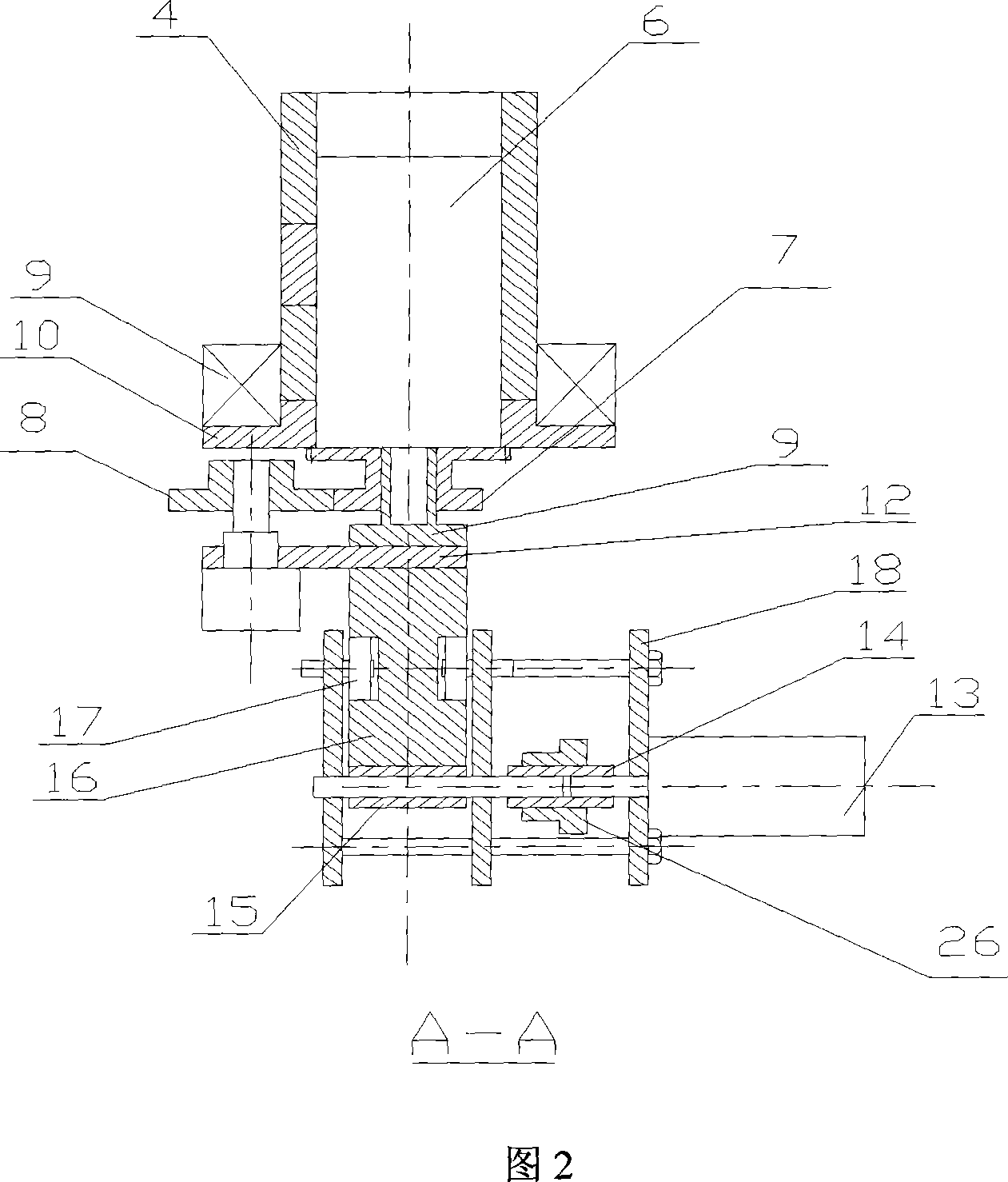
[0024] As shown in Fig. 1 and Fig. 2, the present embodiment includes an auxiliary manipulator frame, a swing mechanism, a rotation mechanism, a pitch mechanism, a feed mechanism and a control system. The secondary axes of motion of the rotary mechanism, the pitch mechanism and the feed mechanism intersect at one point. The swing mechanism, the rotation mechanism, the pitch mechanism and the feed mechanism are connected in series, and each mechanism can be controlled independently. The auxiliary robot mobile phone frame is fixedly connected with the operating bed, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More