

Remote operation planar redundant manipulator automated guided intelligent element, system and method
A technology of intelligent units and robotic arms, applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high computing power and integration ability of various sensory information, complex system structure, simple algorithm, etc., to improve the operation Effectiveness of efficiency and operational performance, simplified system wiring, high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
[0076] This embodiment describes the present invention in detail with regard to the autonomous obstacle avoidance method and the intelligent unit of the teleoperated planar four-degree-of-freedom robotic arm.
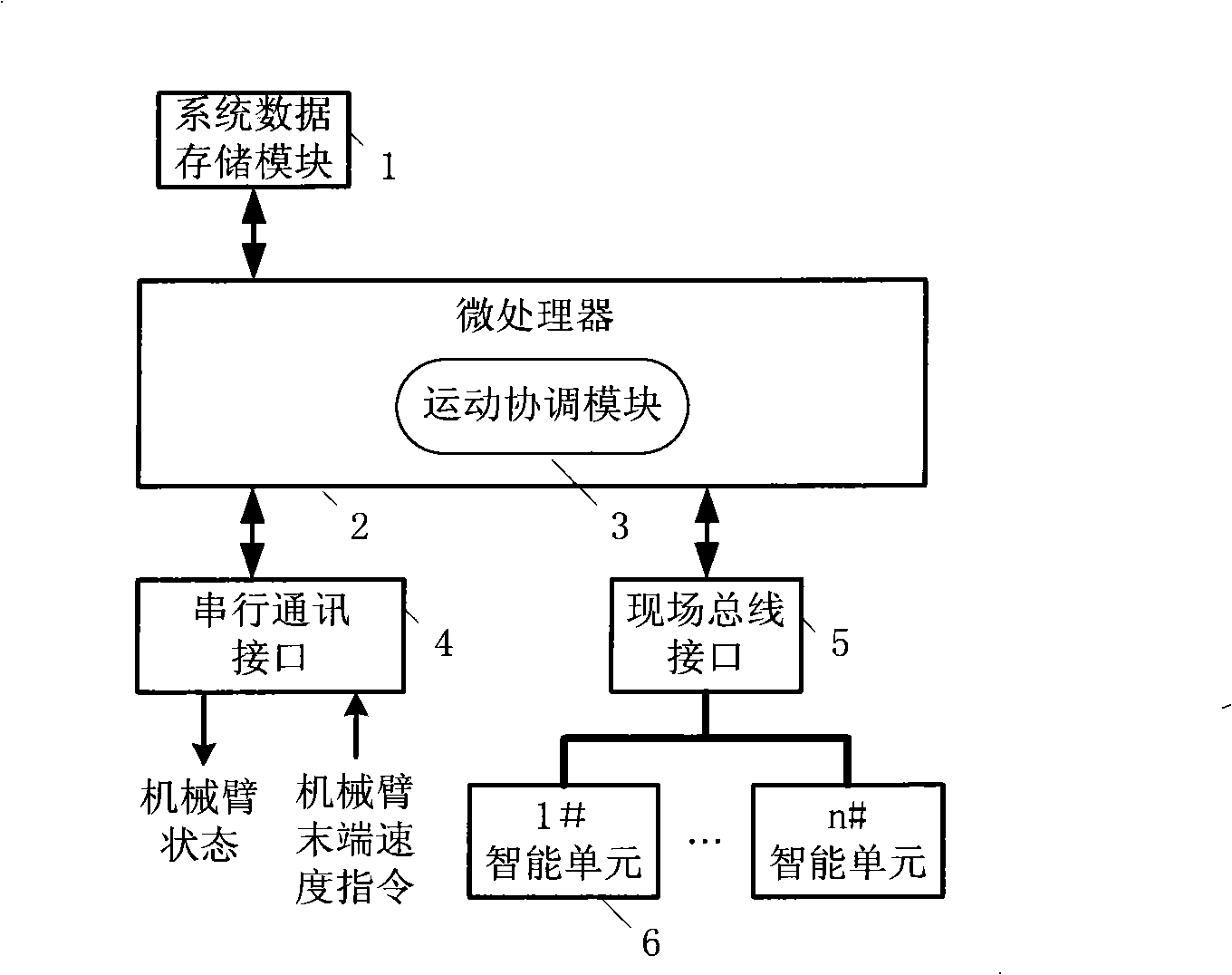
[0077] Such as figure 1 As shown, the teleoperation planar redundancy manipulator motion control and obstacle avoidance system described in this embodiment includes a system data storage module 1, a microprocessor 2, a motion coordination module 3, a serial communication interface 4, and a field bus interface 5 And 1-4# intelligent unit 6. Among them, the sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More