

Information treating platform of small-sized both feet robot
An information processing platform, bipedal robot technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve the problems of high cost, slow progress in humanoid robot research, and high cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0021] 1. The hardware design of the robot controller
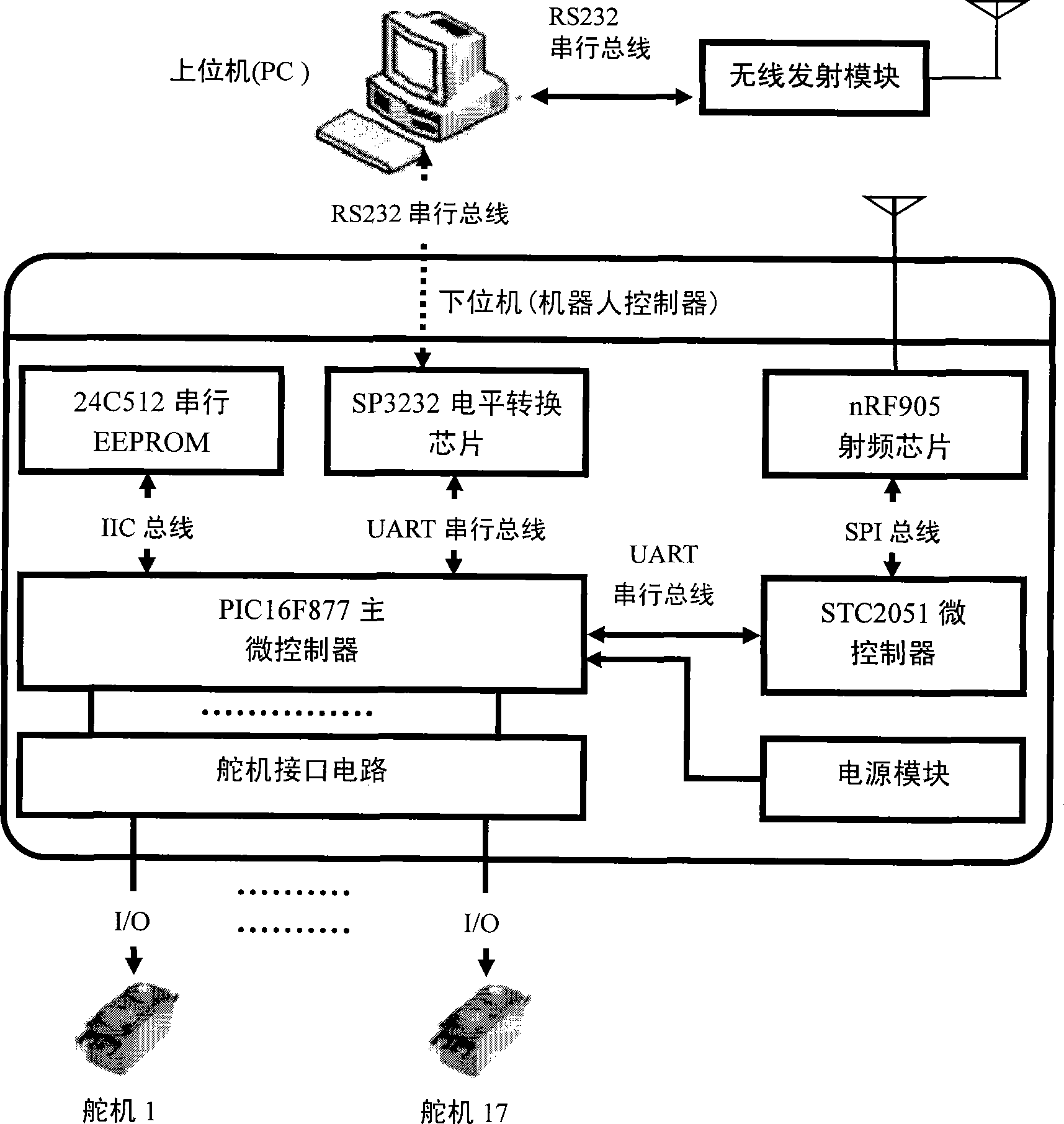
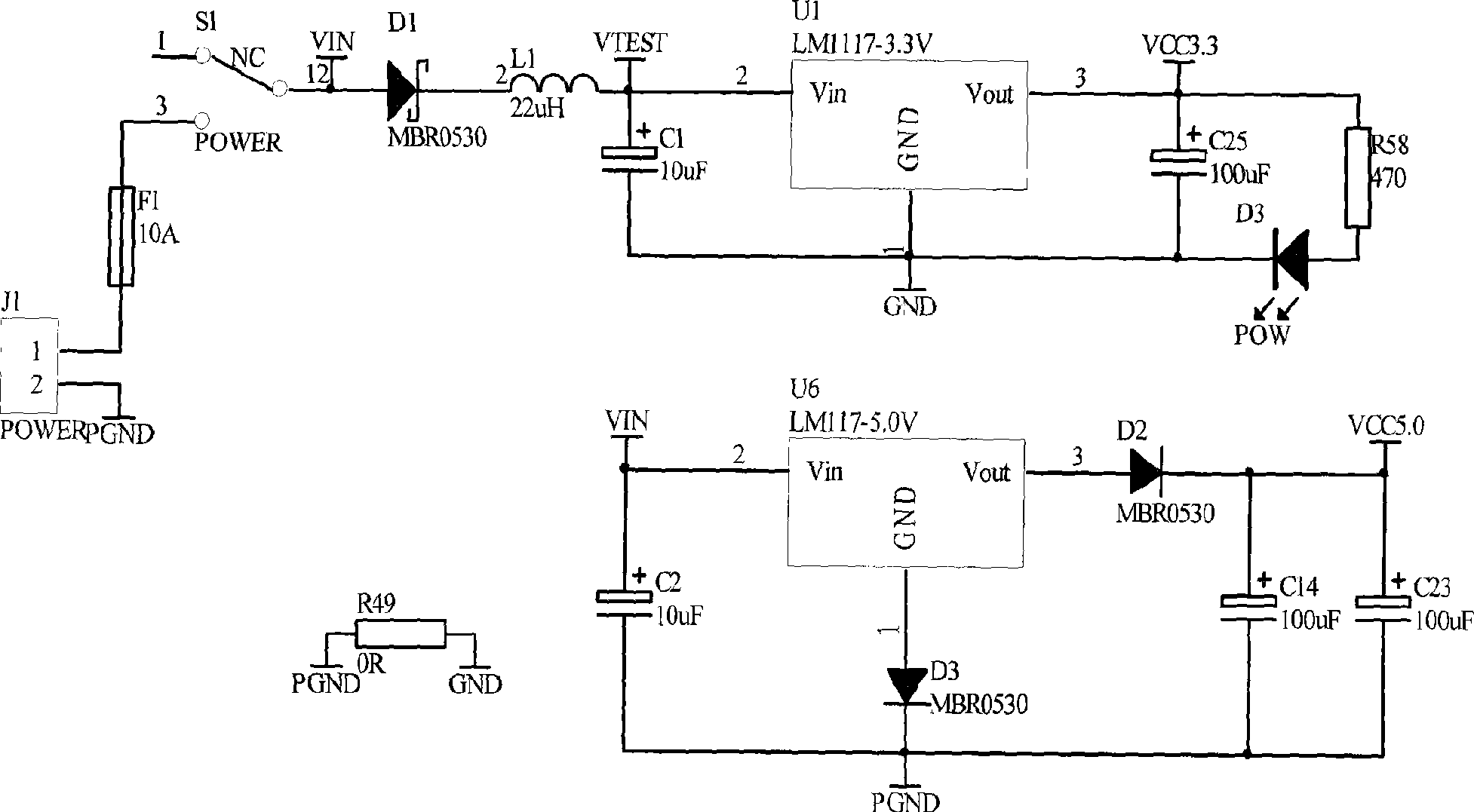
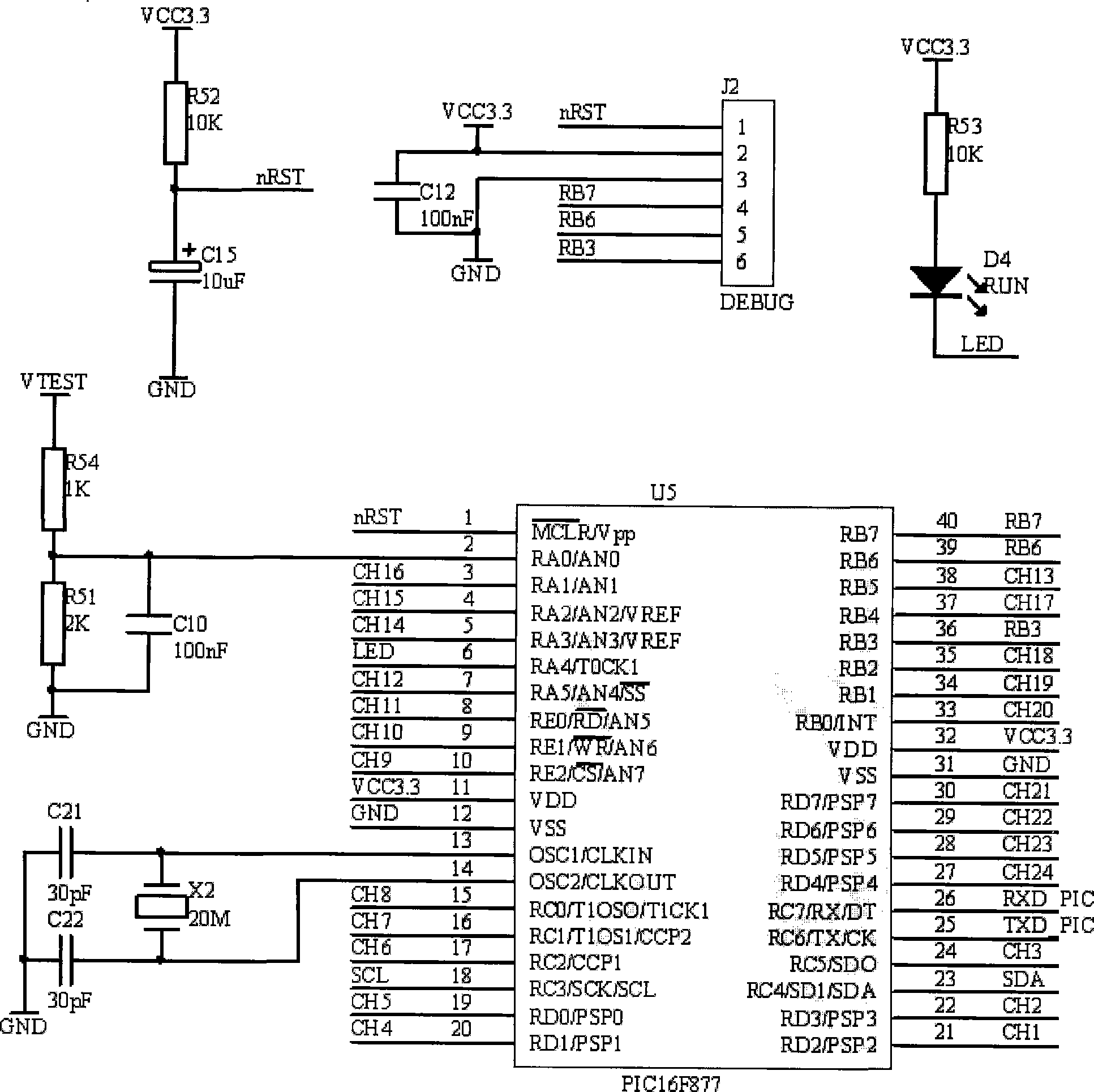
[0022] Such as figure 1 As shown, the hardware part of the robot controller mainly includes four modules: communication transceiver module, steering gear control module, data storage module, and power supply module. The steering gear control module is the core part of the robot controller and determines the performance of the entire system. For better or worse, its main function is to generate multiple PWM waveforms synchronously in real time to drive the robot joints.
[0023] Such as figure 1 As shown, the controller adopts a multi-level distributed control method, which is divided into upper and lower layers of control, and the functions are as follows:
[0024] Upper layer: PC, which completes the off-line calculation and adjustment of robot behavior data, controls and coordinates the action...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More