

Wheeled mobile robot trace tracking method based on quantum behavior particle cluster algorithm
A technology of mobile robot and particle swarm algorithm, applied in the direction of instruments, two-dimensional position/channel control, adaptive control, etc., can solve complex and difficult problems of system integration, achieve simple design process, flexible system, and improve tracking accuracy and speed effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to better understand the technical solutions of the present invention, the implementation manners of the present invention will be further introduced below.
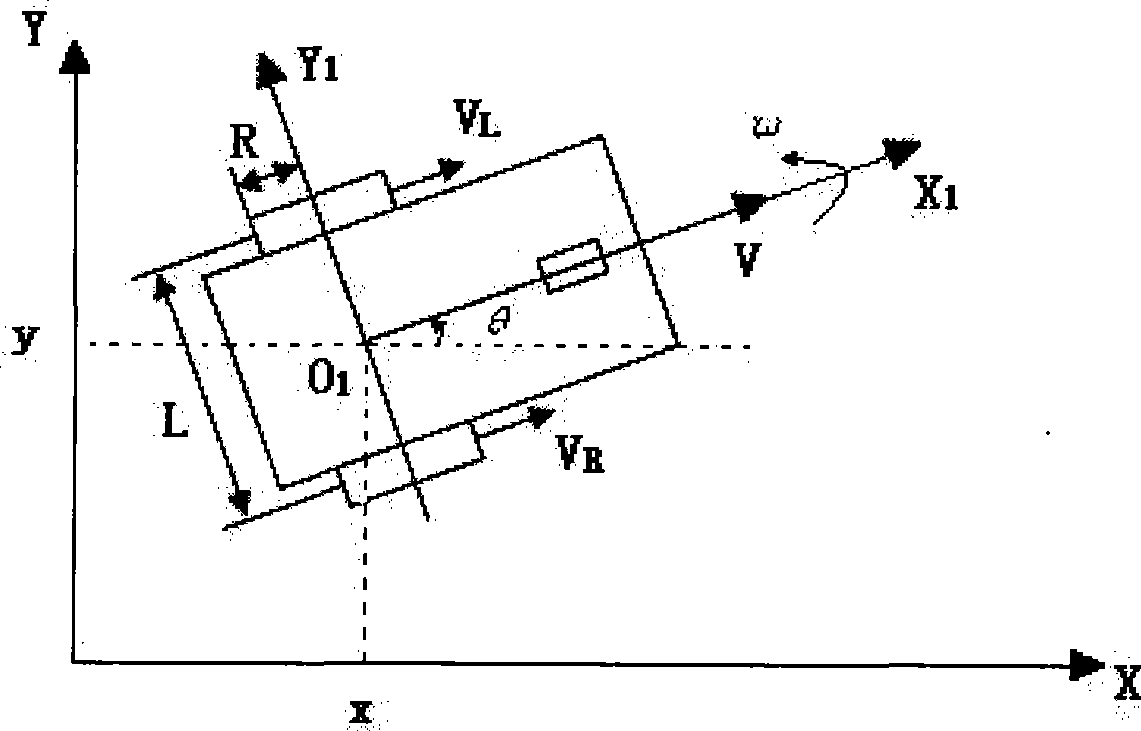
[0028] 1. Establishment of the motion coordinate system of the wheeled mobile robot
[0029] The mechanical structure of an incomplete mobile robot consists of a car body, two driving wheels and a follower wheel, and the follower wheel only plays a supporting role during the movement, such as figure 1 shown.
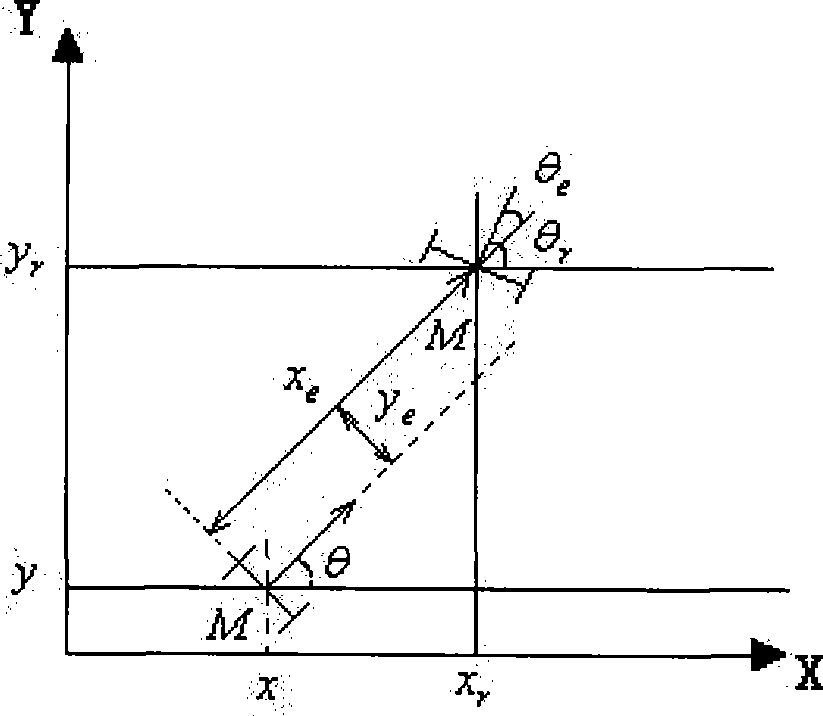
[0030] Since the robot motion itself has directionality, on the two-dimensional plane of the robot motion, two independent plane coordinate systems need to be used to jointly identify the spatial pose and orientation of the robot at a certain moment, which are collectively referred to as pose in robotics. It is represented by a vector q, which means that a non-holonomic mobile robot system occupying a certain volume in space is abstracted as a reference point, and the coordinates of the reference p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More