


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Auto-control regulation algorithm and control instrument
A technology for controlling instruments and algorithms, applied in the direction of electrical program control, program control in sequence/logic controllers, etc., can solve problems such as fuzzy control, and achieve the effect of suppressing influence, small program, and improving control level
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
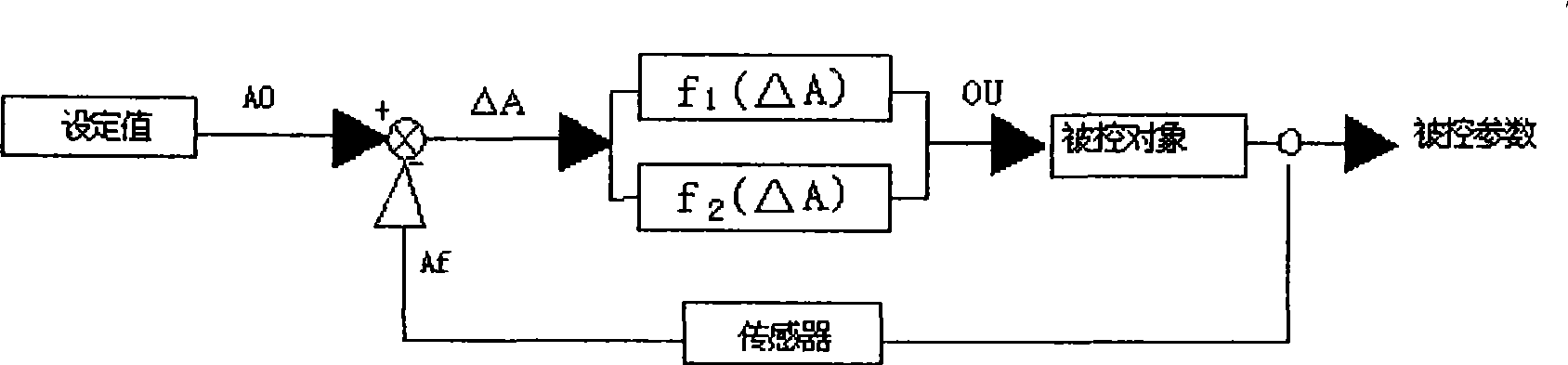
[0015] like figure 1 As shown, the self-control adjustment algorithm described in this embodiment divides the control process into two situations: pushing the controlled system from one state to another, and the output at this time is called abnormal quantity; making the controlled system Maintaining a stable state in a certain state, the output at this time is called the maintenance amount; the abnormal amount is the estimated value obtained through the time-dependent transformation of the physical law applicable to the controlled system; after the controlled system reaches the required state , the change of the abnormal quantity is the maintenance quantity, and the maintenance quantity is the value obtained by the physical law applied to the controlled system not changing with time. Output OU=f1(ΔA)+f2(ΔA), where ΔA is the difference Af between the set value A0 and the actual value, where f1(ΔA) is the abnormal value, and f2(ΔA) is the maintenance value. In the control proc...
Embodiment 2
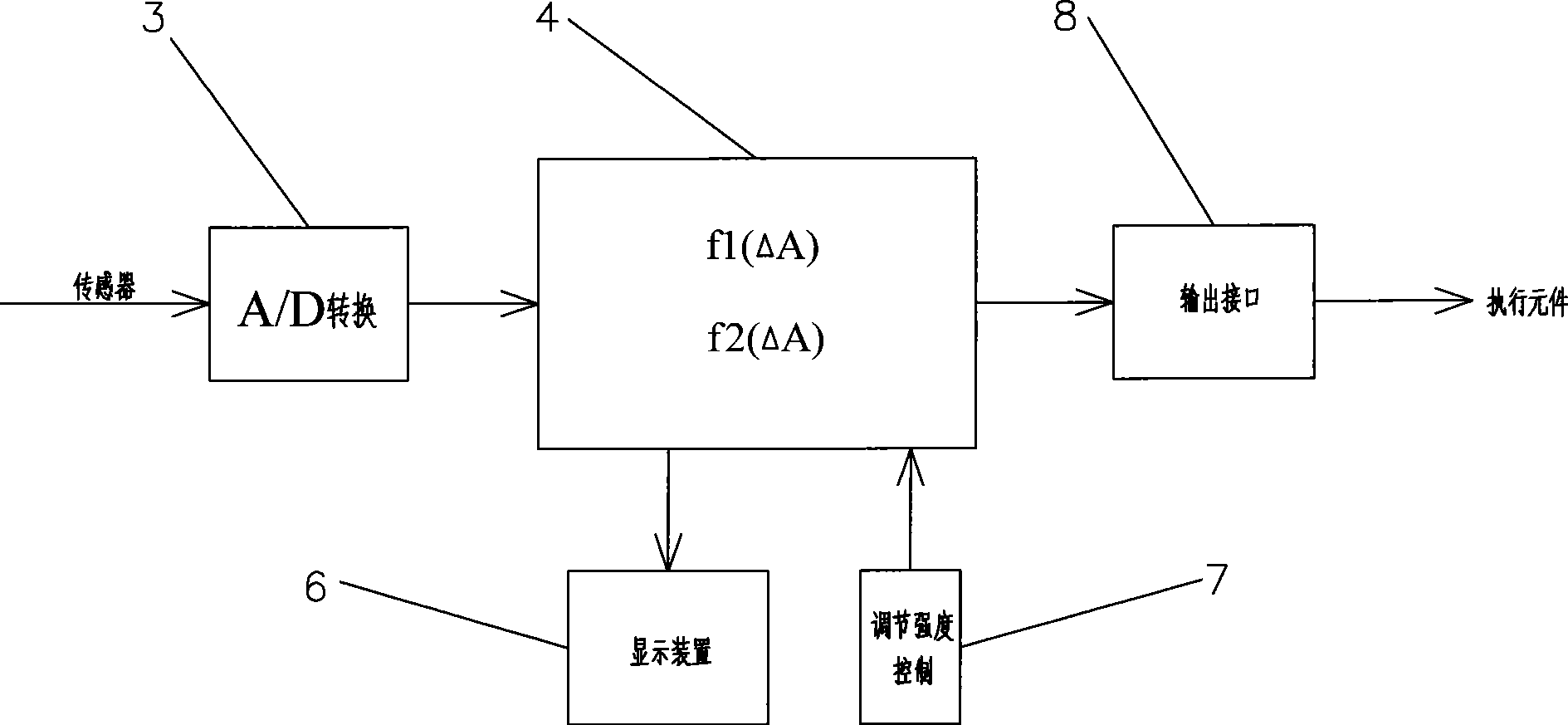
[0017] like image 3 , Figure 4 As shown, the control instrument described in this embodiment mainly includes a housing 1, on which a data input interface 2 is provided, and the data input interface 2 is electrically connected to the control center 4 through a signal converter 3, and the signal converter 3 is The A / D converter and the control center 4 are electrically connected to the display device 6, the intensity selection button 7 and the output interface 8 arranged on the casing. Wherein the display device 6 is a liquid crystal display.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com