

Control method and full-servo control system for operating multi-axis mechanical arm
A servo control system and robotic arm technology, applied in the field of full servo control system, can solve problems such as single operation mode of mechanical digital control function, short execution cycle, fault handling time, system abnormality, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In this embodiment, its input power supply specification is: 3Φ220VAC 50~60Hz; the power consumption is set according to the model; the control power supply specification: AC input: 170~264VAC, DC output: DC24V3A, DC5V6A; the operating environment temperature Keep at 0-60°C, keep the operating environment humidity at 35%-90%, and keep the storage environment temperature at -5-60°C.
[0025] In this embodiment, all logical operation instructions and their usage are represented by general formulas and unit icons in the industry. The setting category of the value and its operation type are combined with its logical operation instructions, and must be public variable numbers and set to specify their value ranges. Scope, there is no need for a special description except for a special definition.
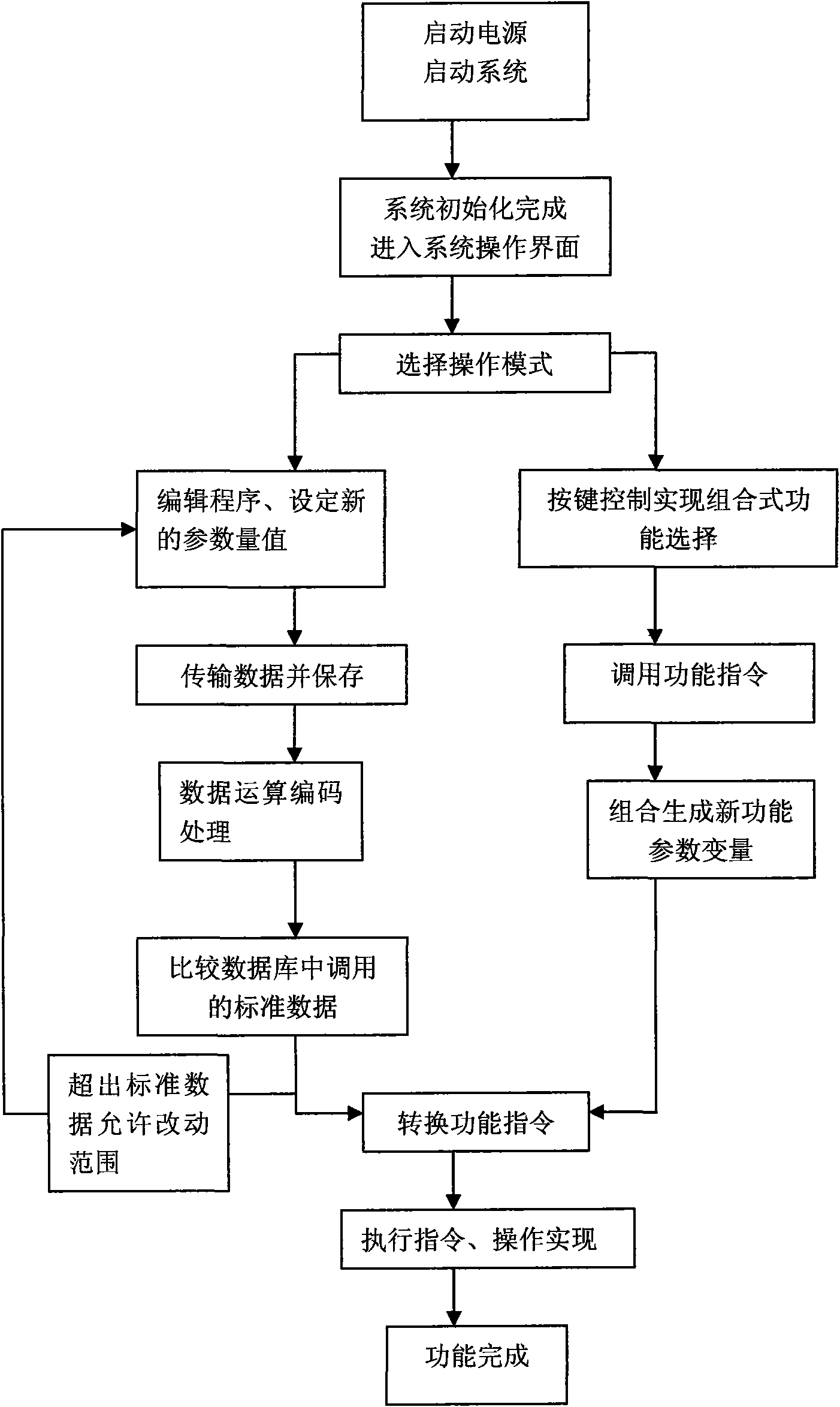
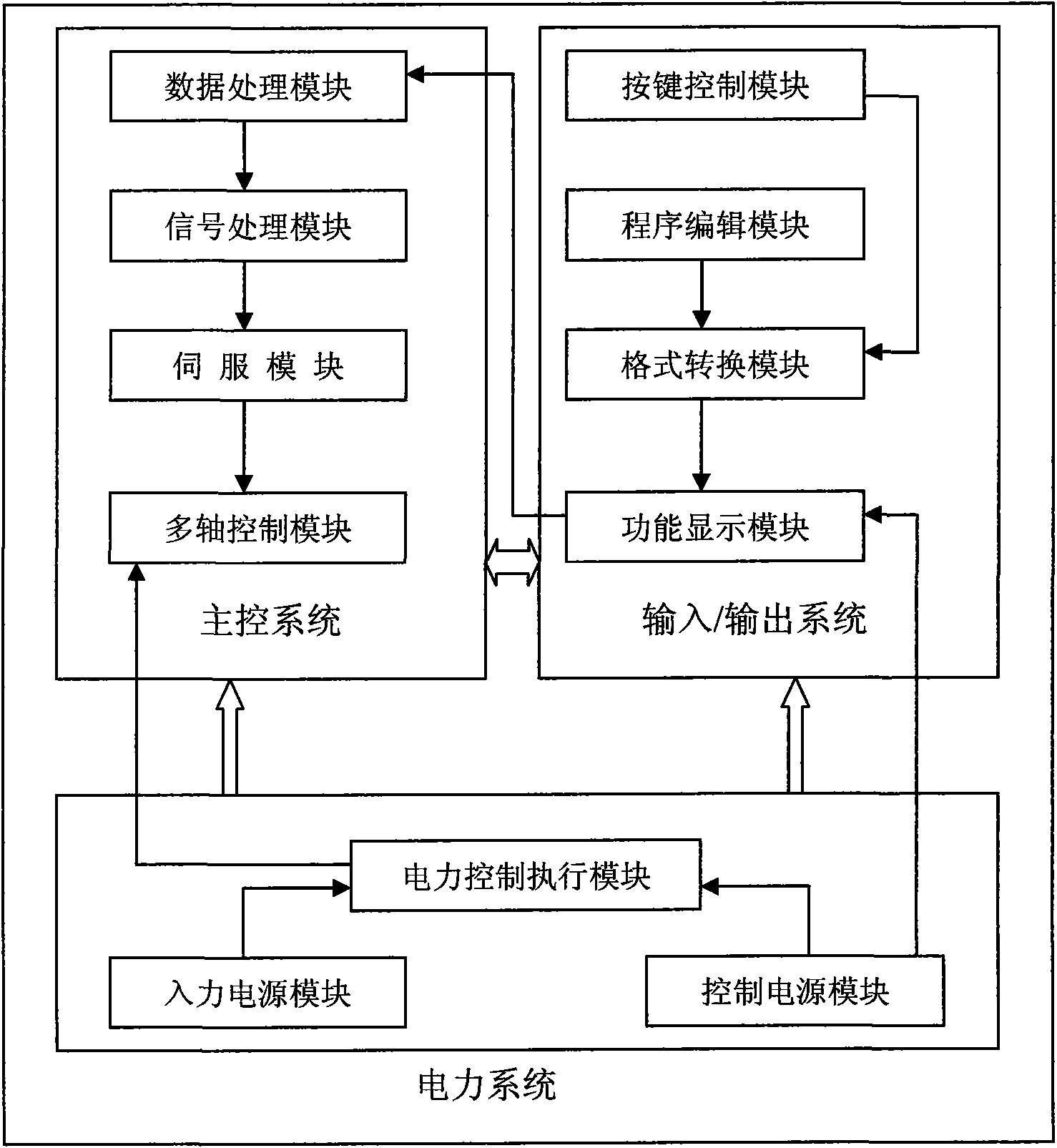
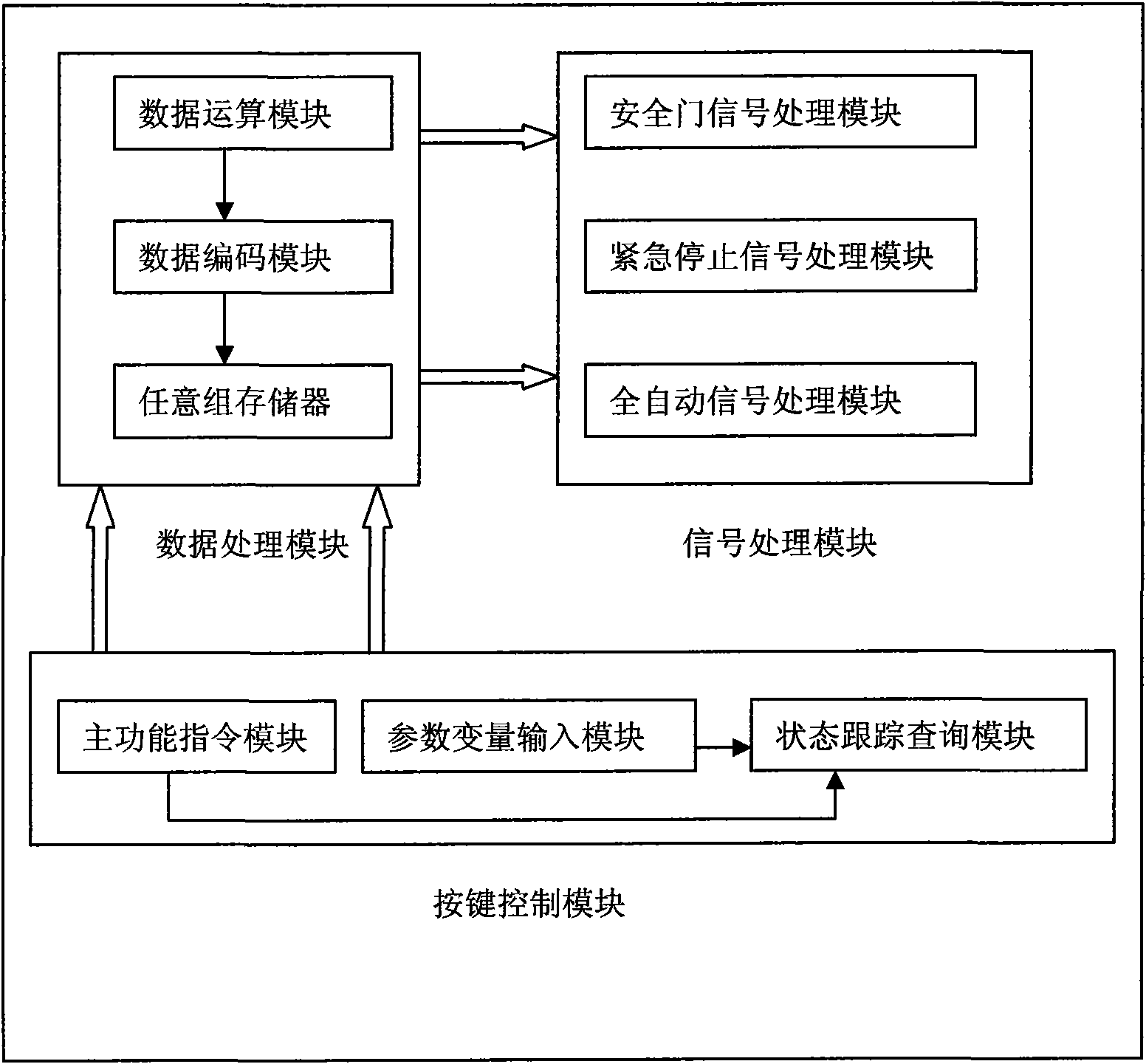
[0026] see figure 1 , a control method for operating a multi-axis robotic arm, which includes a robotic arm body, an ELC-2202 controller, an 8.4” color touch screen, and an axis p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More