

One-wheel robot system and control method thereof
A robot system and robot technology, applied in the field of intelligent robots, can solve problems such as complexity, angle integral offset, system instability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] Below with the accompanying drawings Figure 1-Figure 7 The present invention is described in detail:
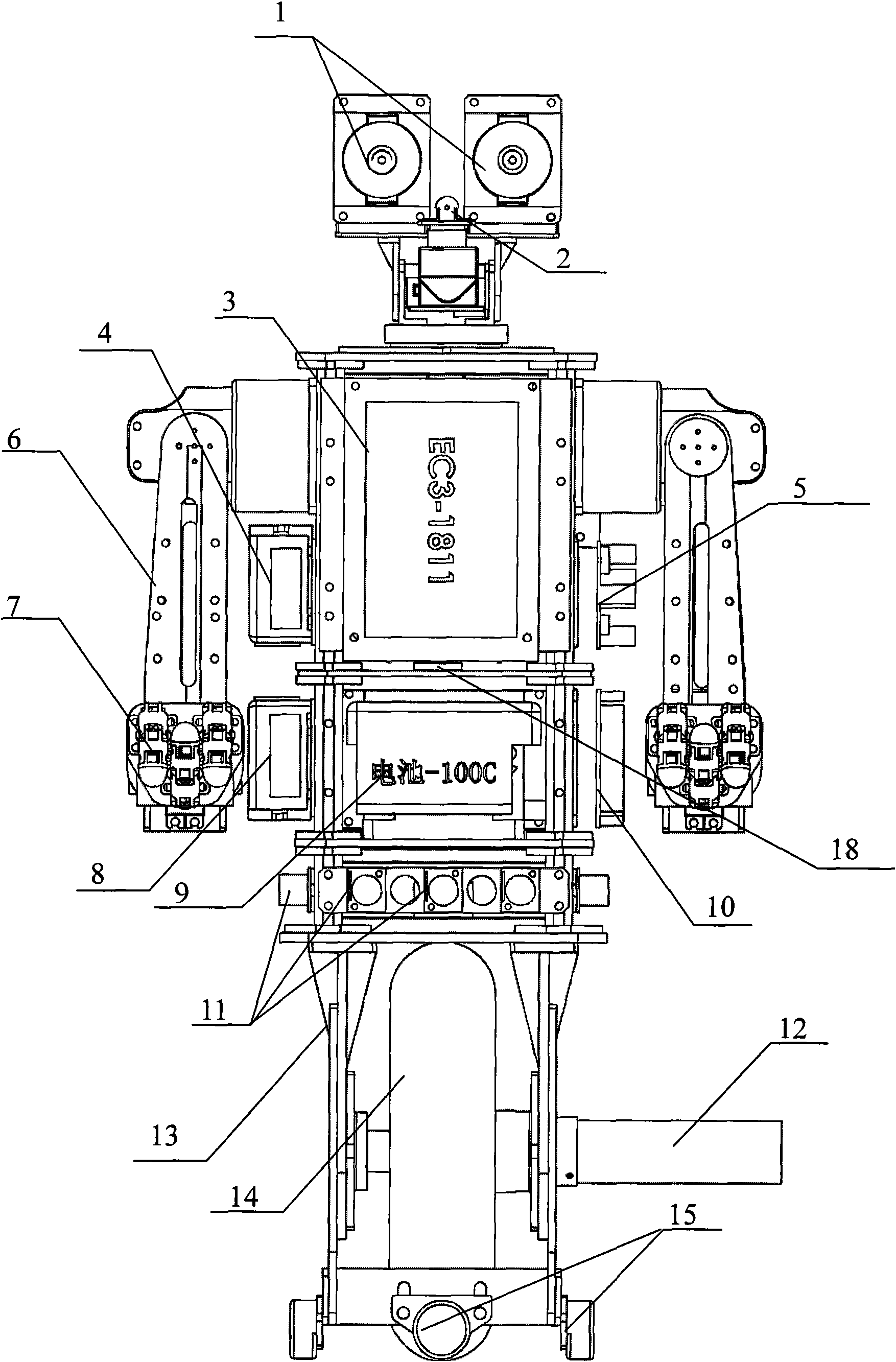
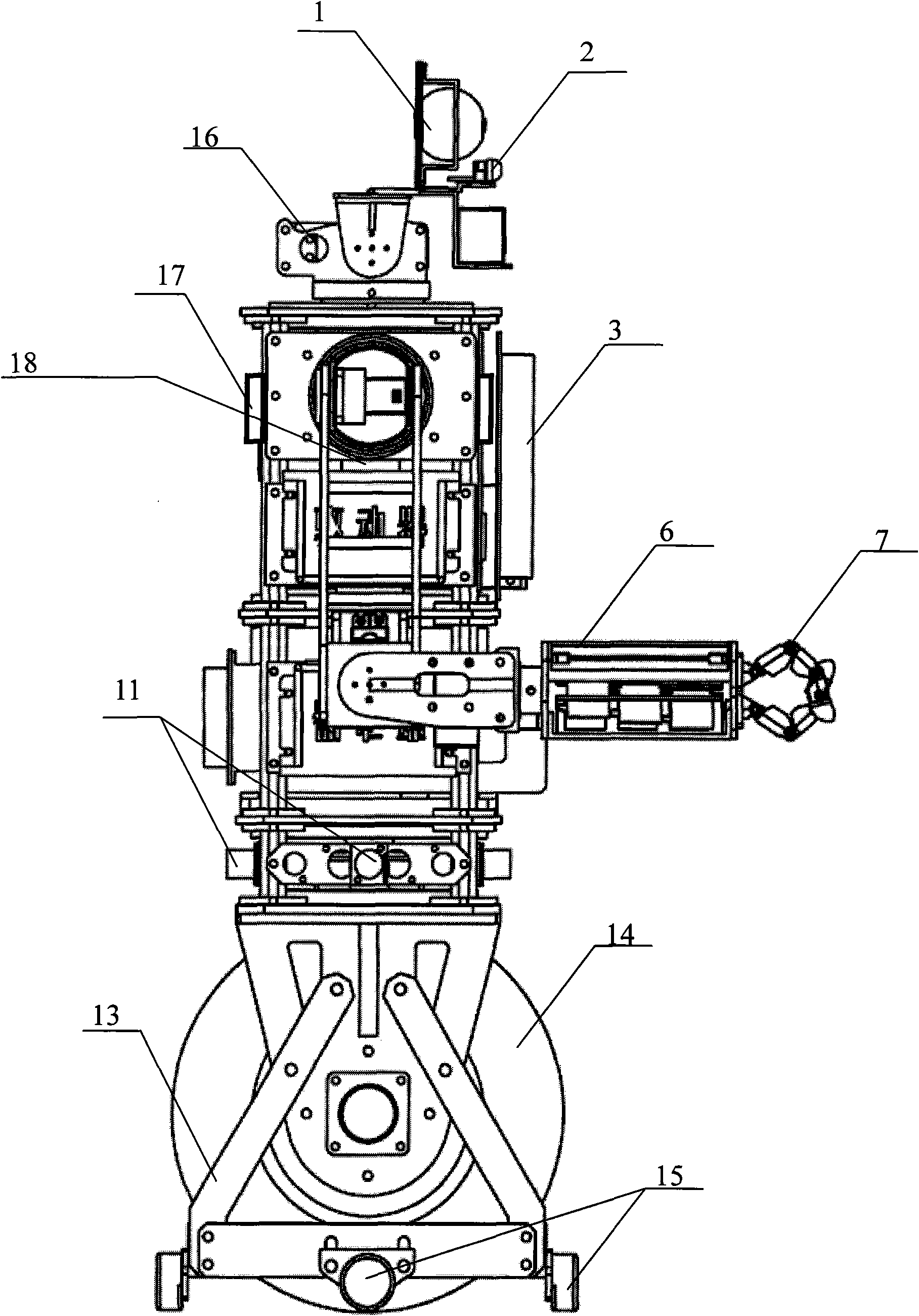
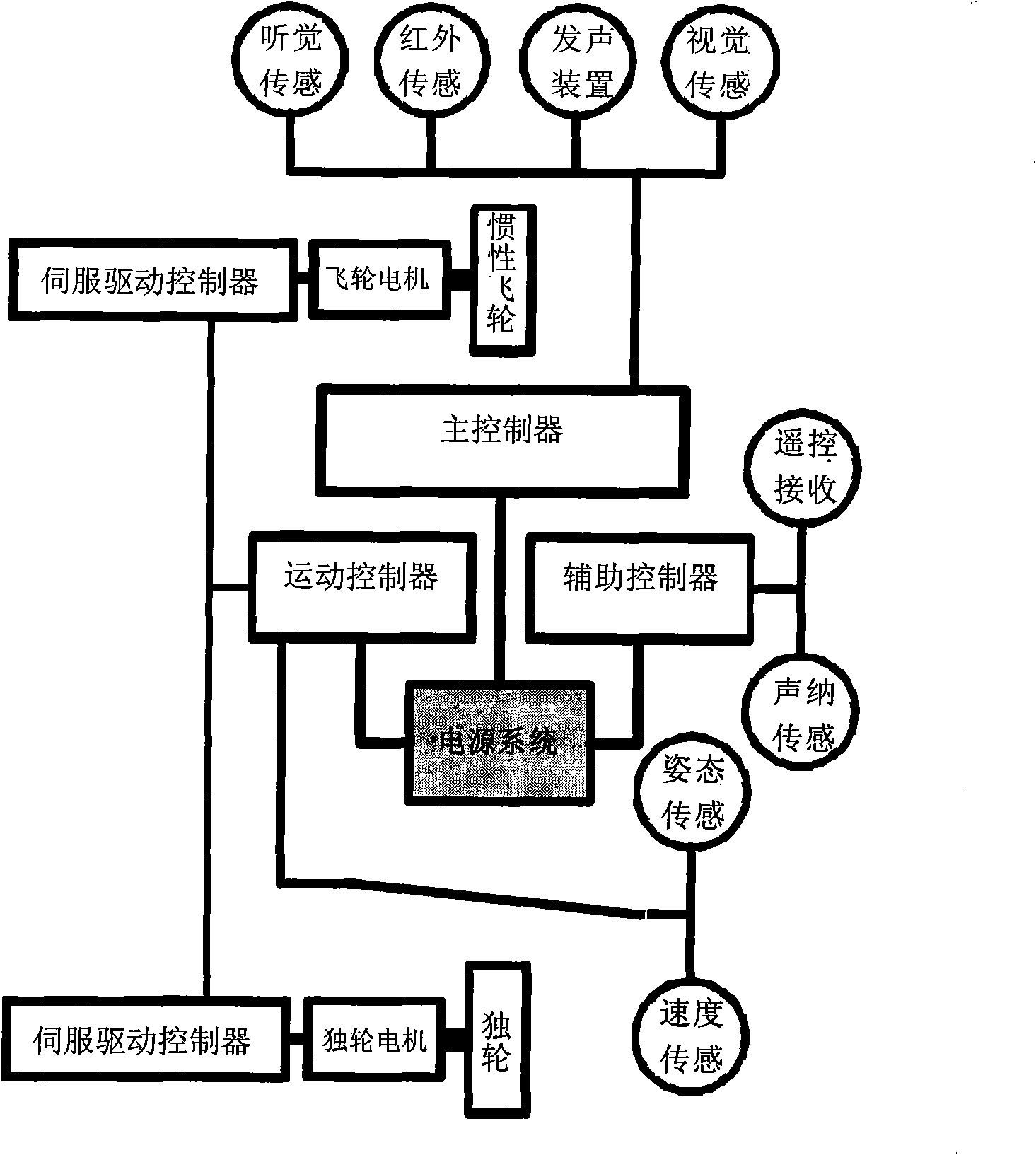
[0057] The robot system of the autonomous riding unicycle of the present invention comprises a mechanical body and an electrical system (control system), wherein the overall structure of the mechanical body is:
[0058] Torso: Rigid robot body design composed of aluminum alloy brackets.
[0059] Head and neck: The modular design of the two-dimensional gimbal allows the robot to pitch up and down and turn its head left and right.
[0060] Robotic Arm 6: In order to complete some specific tasks, a modular detachable robotic arm capable of complex operations is used.
[0061] Manipulator 7: has an operable, replaceable, modular multi-fingered manipulator to accomplish tasks.
[0062] Overall balance control structure: the vertical installation structure of the lower motion balance assembly (lower shaft assembly) and the upper balance assembly (lower shaft assembly). ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More